こんにちは。だいCです。以前 運動知能研ライブラリ milib の環境構築をしてみました。今回からライブラリの中身を見ていきたいと思います。 まず最初にmilibの計算の根幹となる「ZEDA」について見ていきたいと思いま…
Just another WordPress site
カテゴリー: 未分類
milib環境を構築してみよう
こんにちは。だいCです。 ロボットのプログラミングしたいよーって人います?今回からロボットのプログラミングを始めてみようと思います。 自分は「ロボットのプログラミングって何ですか?」って思うことがよくあります。 別にロボ…
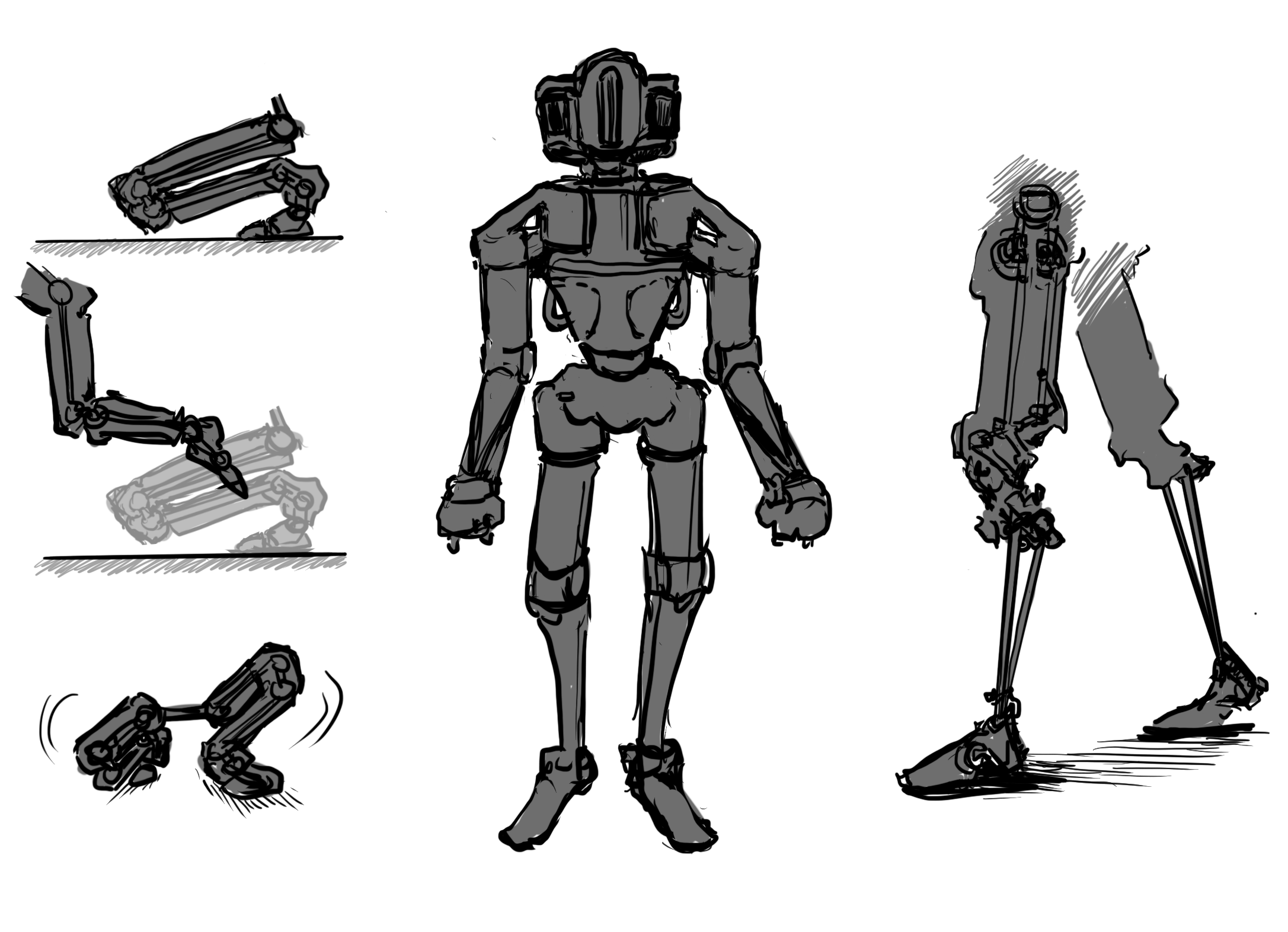
2脚ロボットの要件定義
こんにちは。だいCです。 ここに書いているものは、日頃の自分の考えを整理して後で見直すためのブログになります。 今回のお題は「2脚ロボットの 要件定義」になります。 要件定義とは、 ユーザや 利用客側の持っている、「あれ…
ロボットのPTP動作コマンドとその問題
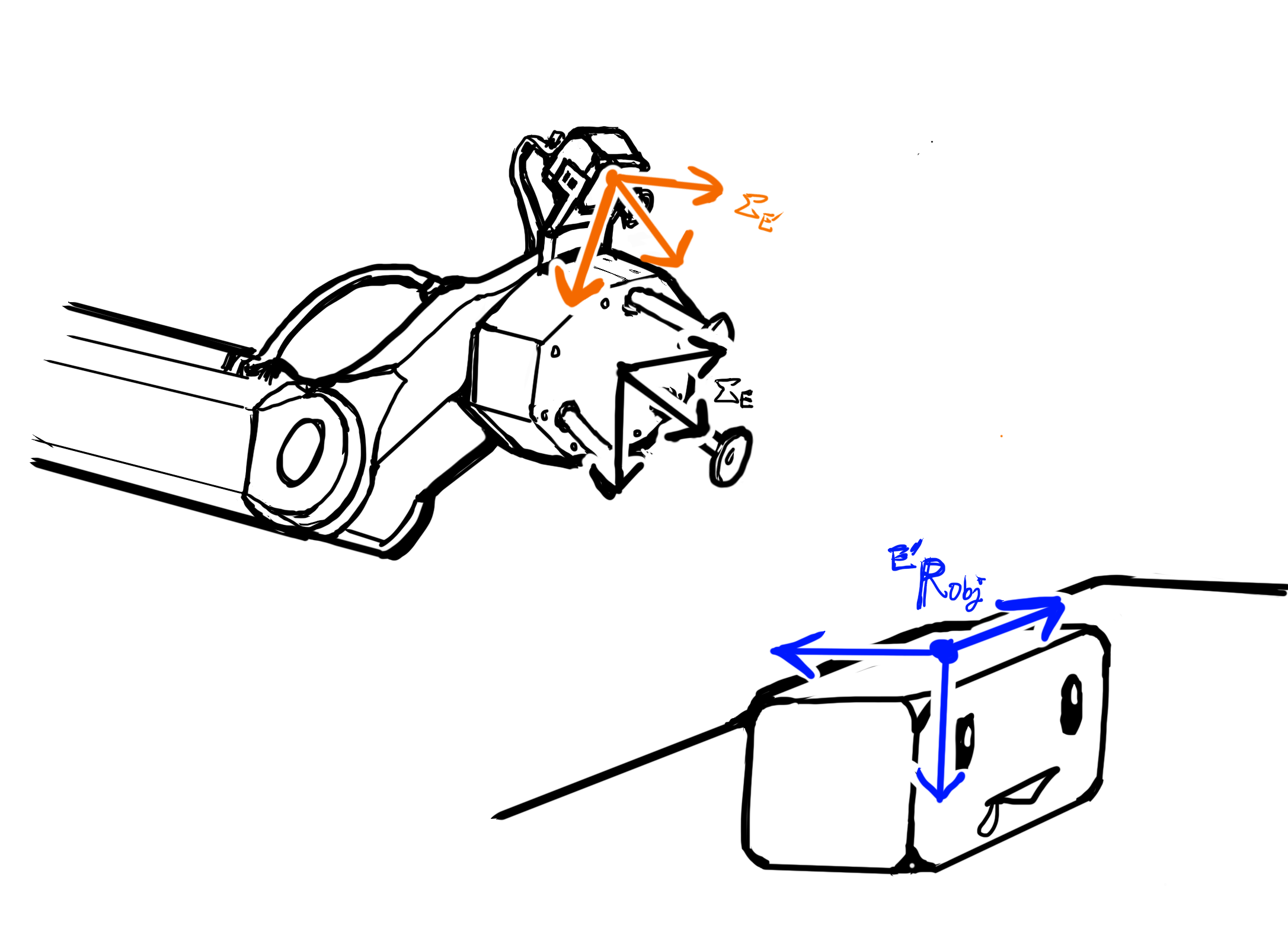
こんにちは。お久しぶりの投稿です。 今までは剛体の回転運動についてしか書いてませんでした。ここらで、実際のロボットの動作に少し絡めて自分の学習の方向性を整理しておきたいと思います。 1. 目的 今回の目的は、以下の2つに…
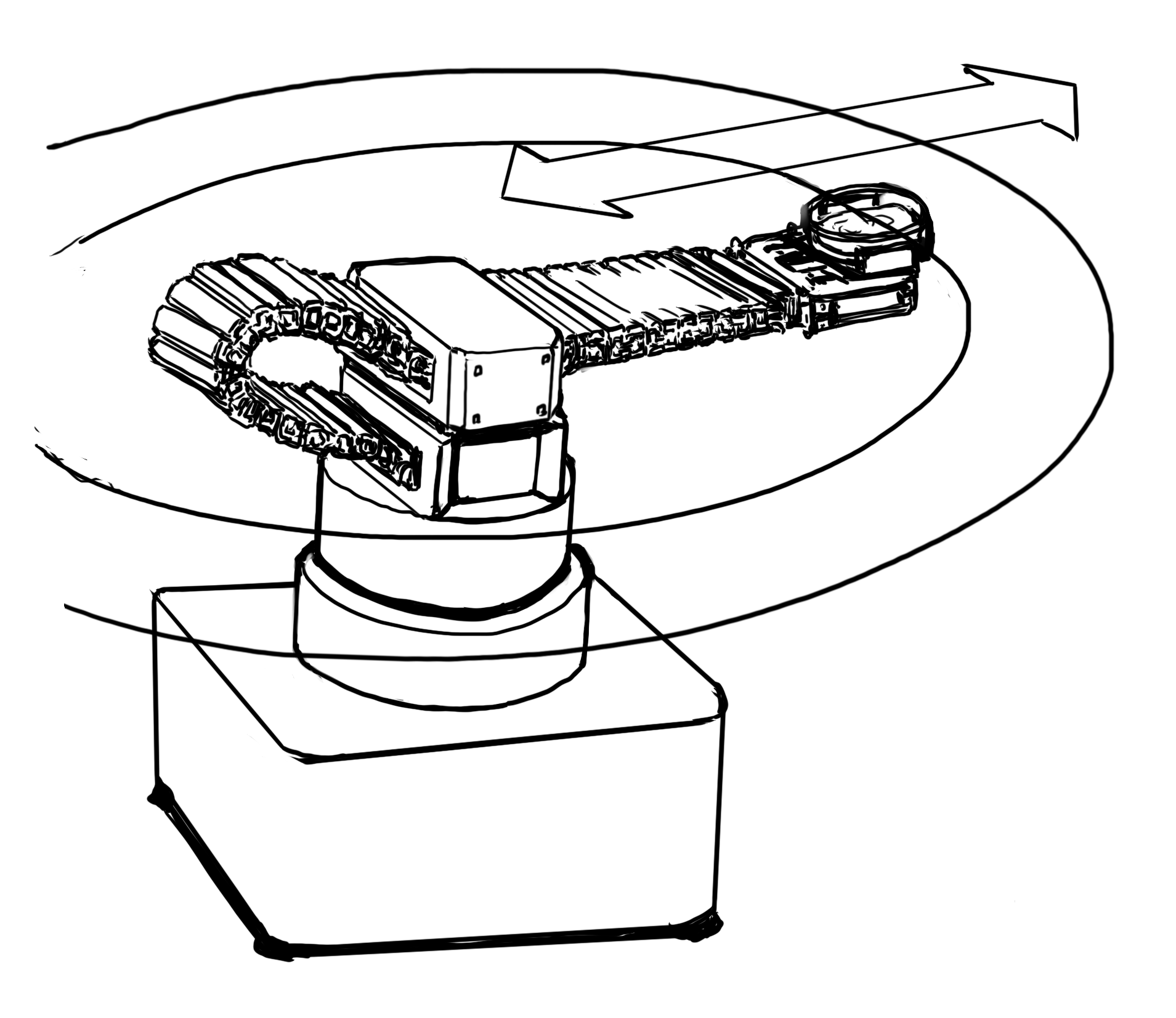
剛体の運動(回転と伸縮をもつ運動 ―コリオリの力)
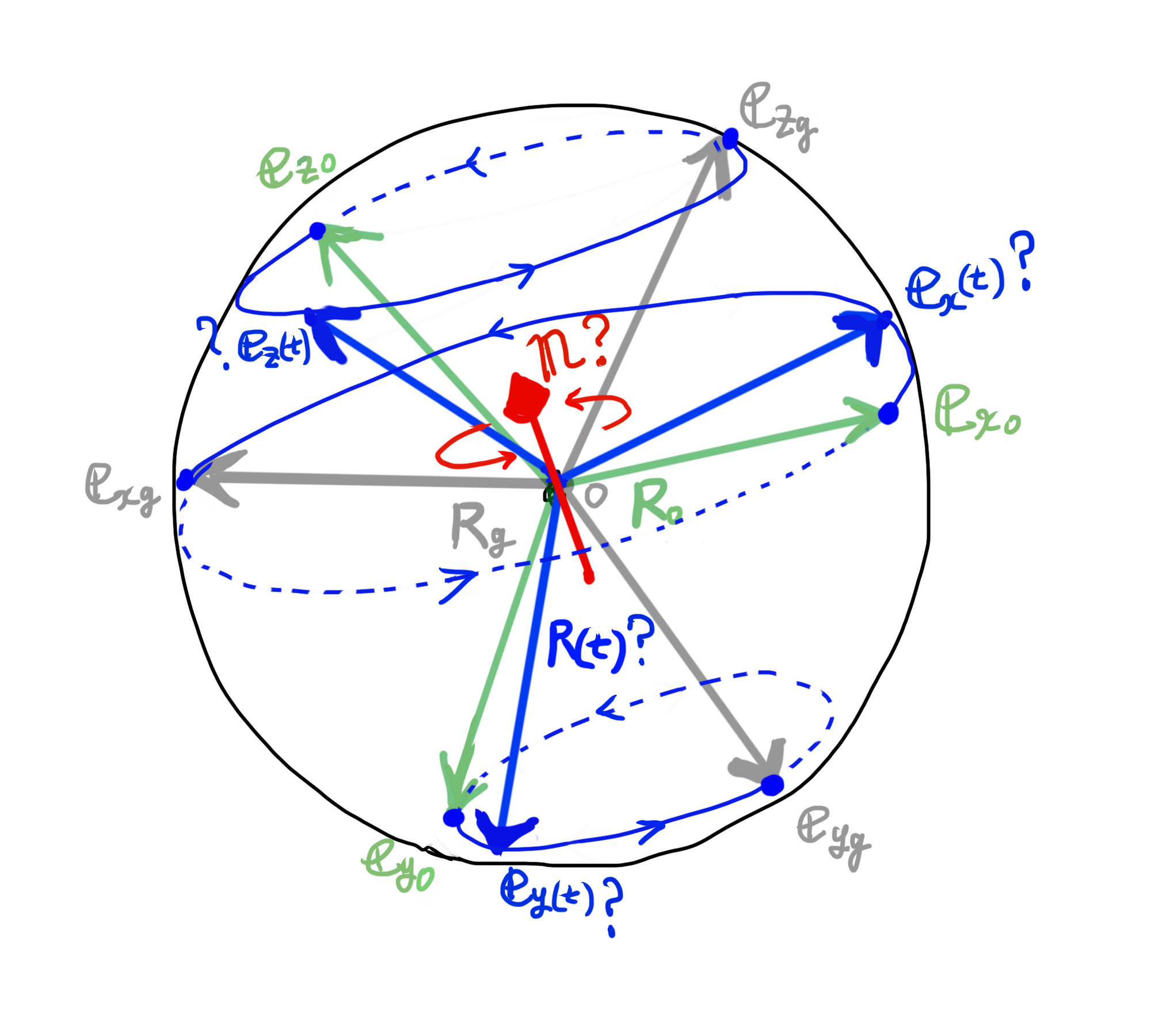
こんにちは。 だいCです。 このブログはノート代わりに使っています。 今回は回転&並進についてノートします。 1. 目的 1つの回転軸まわりの回転と並進が複合した運動における、 質点の位置姿勢の速度・加速度を求める 2.…
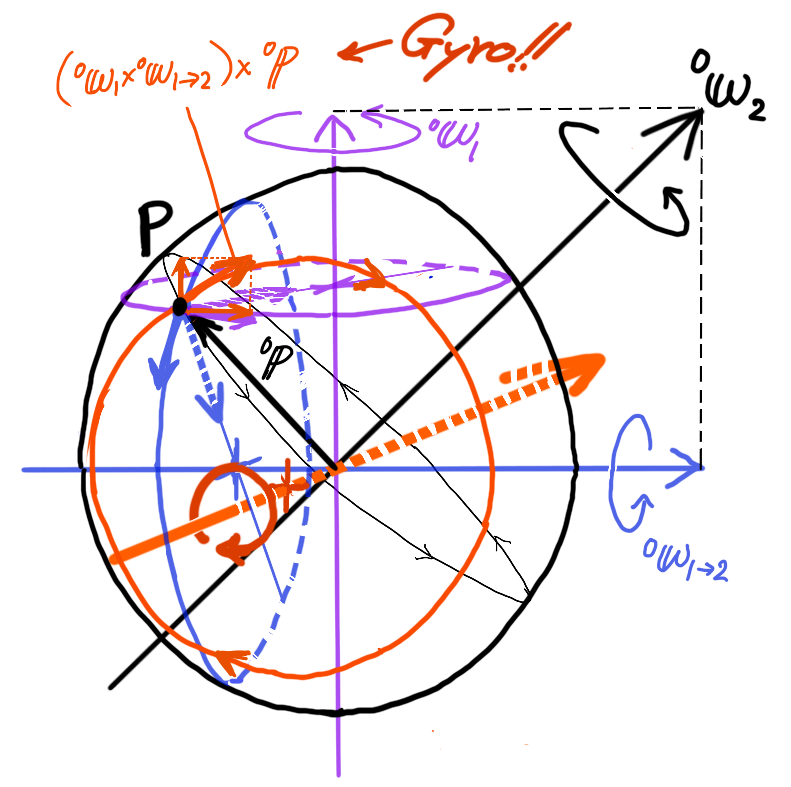
剛体の運動(二つの回転軸まわりの運動―ジャイロ効果)
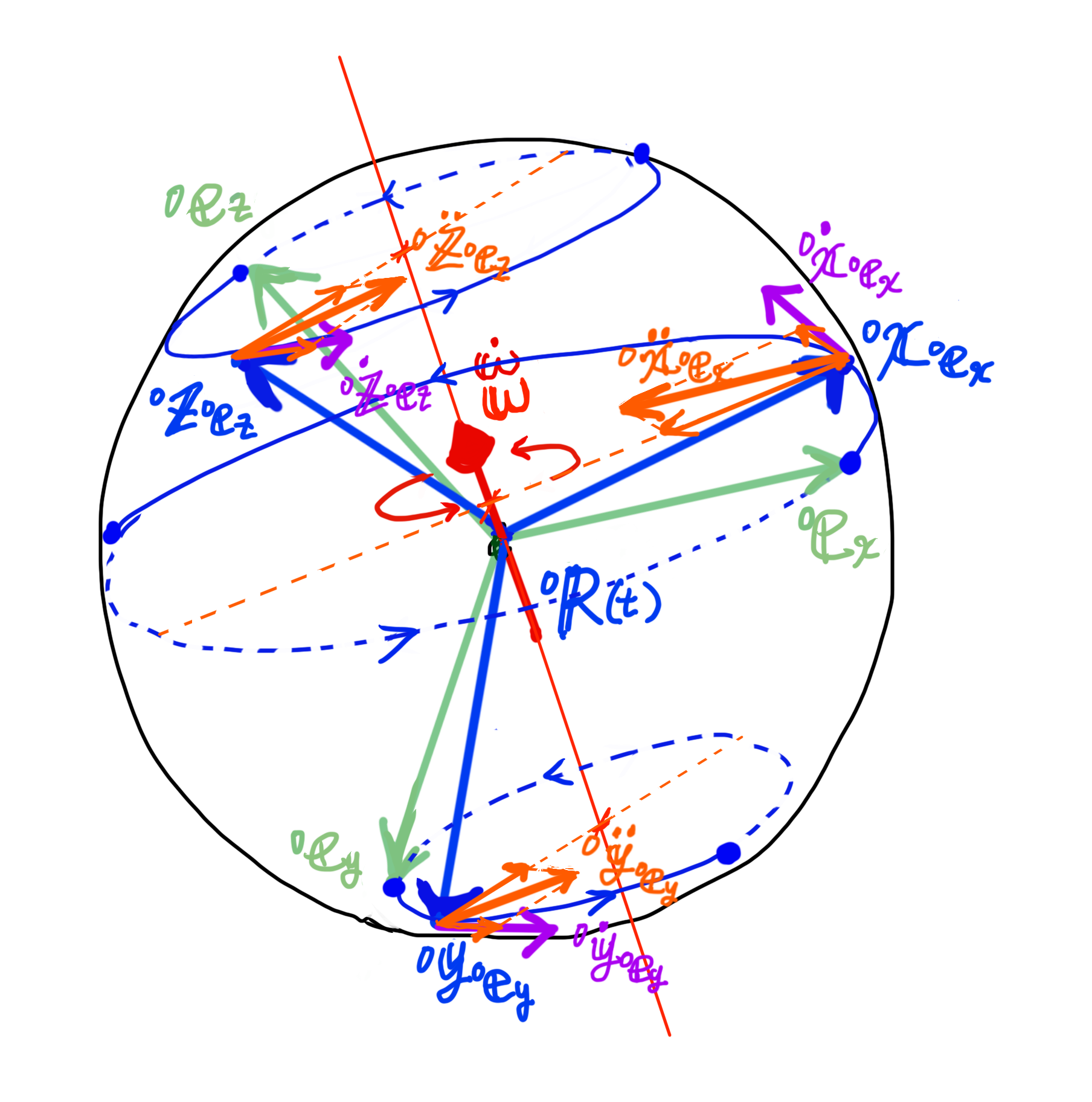
こんにちは。だいCです。 これまで一つの回転軸まわりの回転運動だけ考えてきましたが、 今回からはさらに別の回転や並進運動も複合させた運動についても考えていこうと思います。 いずれは連鎖座標系の速度・加速度としてまとめよう…
剛体の運動(回転運動の速度・加速度・躍度)
こんにちは。だいCです。 今回は回転運動によって発生する、直交座標空間上の速度、加速度、躍度についてノートします。 1. 目的 一つの回転軸まわりの回転運動における、質点の位置姿勢の速度、加速…
剛体の運動(姿勢のオフセット)
こんにちは、だいCです。 剛体の運動について、回転に関する話ばかり書いています。 剛体の運動方向の自由度は、「位置」と「姿勢」の2種類で表現してます。 回転方向の自由度を「姿勢」と呼んでいます。 この「姿勢」という言葉は…
剛体の運動(2つの姿勢の補間)
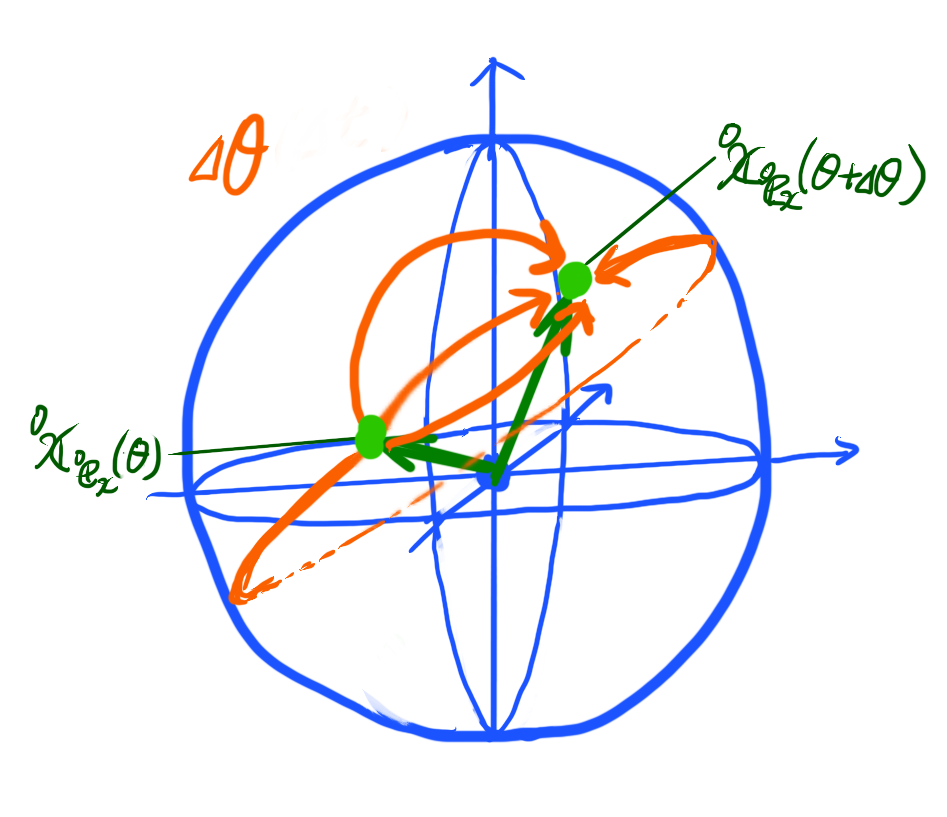
こんにちは。だいCです。 前回「剛体の回転行列の速度とは」で、姿勢の変化は基底ベクトルの移動を表していて、 基底ベクトルの移動の仕方は、回転角の変化\( \Delta \theta \)(\( \theta(t)の軌…
剛体の運動(回転行列の速度とは)
こんにちは。だいCです。 このブログはノート代わりに使わせてもらっています。 前回、回転運動の速度をどのように表すかで、回転行列の速度\( \dot {\bf R}(t) \)を求めました。 「速度が求まってので、次は加…