こんにちは。だいCです。
ここに書いているものは、日頃の自分の考えを整理して後で見直すためのブログになります。
今回のお題は「2脚ロボットの 要件定義」になります。
要件定義とは、
- ユーザや 利用客側の持っている、「あれが欲しい」「これして欲しい」という製品や、サービス、機能、価格など、利用者からの要望・要求(ニーズ)
- 作り手や 提供者側の持っている、「(事象やモノ)〜が存在する」「これこれできる」という実現性(シーズ)
の要求と実現性を書き下し、照らし合わせ、
要求が必須かどうかの優先度、再現・理論的な証明・試作・設計・テストができるかどうかの可能性、期間や費用のボリュームと妥当性など 実現度合いを定義して、
「ではこれを〜(何時)〜までに〜(費用)〜で完成 させましょう」
と、商品開発の目標を定かにするフレームワークの一つです。
本記事では、2脚ロボットに限定し、
ざっくり思いつく程度で良いので、要件定義を試みてみます。
Contents
1. ニーズとシーズ
商品開発の前提として、まずはここから話を始めます。
要件定義の要(かなめ)となる、ニーズとシーズについて、自分なりの考えを書いておきます。
あまりに幼稚な内容かもしれませんので、
この1章を飛ばして2章以降から読み進めてもらって構いません。
1.1. ニーズ(要求)ベース
商品開発プロジェクトにおいて、企業は顧客の要求をトップダウンに考えて様々な課題を明らかにし、最適な解決方法を提供できるように課題ごとに目標(目的)と計画を決めて効率よく制作を進めることが理想的だと聞きます。
どんな人でも要求が叶えられる事は貴重です。要求実現には対価を支払うだけの価値があります。価値は要求の度合いや実現困難な度合いに応じます。
要求を持った人達は誰でも顧客になり得る可能性があり、顧客それぞれの抱える要求をうまく叶える解決方法を売って実現・提供できれば商売になるということです。拡大解釈すれば、人々の抱える問題は何でも商売になるかもしれないのです。
1.1.1. 人々の問題→要求と価値
要求の度合いが大きいほど、高い価値があると書きました。
はてさて要求の度合い、高い価値とは何かと思いますね。
原価企画の考えだと、能力(機能や精度)や品質や信頼性、納期などの要求を考えて、先にその要求に見合う市場価格(予想競争市価)を予測して収益を決めてから、そのあと見合った原価を決めたりするそうです。現行市場に似た製品がある場合には、現行の似た製品の原価(成行原価)を元に、そこからコストダウンの削減額を決めて原価を決めたりするそうです。原価企画の考えだと、この市場価格が価値に当たるという事のようです。
価値工学の考えでは物の原価よりも機能を重視し、価値 = 機能 / 原価 とするそうです、機能はもちろん要求に含まれるものです。
たとえば多くの人々が叶えて欲しいと思う要求・問題ほど高い価値があるとも言えるかもしれません。また、たとえ今は少ない人数の要求でも今後の人類進歩・存亡に関わる問題であれば高い価値があるとみなされるかもしれません。
価値が高いかどうかで、やる/やらないを決めるのはイヤらしいと言われるかもしれませんが、生き残りを賭けた企業にとっては重要な判断材料です。人々の抱える問題を解決することから、企業にとって利益を生む商品につながるという論理は、意思決定の重要な指標になります。
1.1.2. 人の問題解決手段としての代理人→人型ロボット
では、人々の抱える問題を解決して欲しいという、まずは漠然とした要求を起点にして、その要求を叶えるための実現手段を考えてみます。まずはあまり悩まず深く考えず要求分析も課題特定もせず詳細もとりあえず置いておきましょう。具体的な実現性(できること、技術的な確証)もまずは無視します。
人々の抱える問題を解決する実現手段として、自分自身の手で解決したい、解決するしかないという場合を除いて、
人の手を雇って代わりに解決してもらうという案が一番シンプルですぐに挙げられます。
「代わりに同じことができる人がいれば…」
とすると代わりに解決してくれる人を用意するにはどうすればよいかという困難が生じます。そこで次に、人の手を借りずに実現する手段はないか?と考えられるでしょう。とりあえず実現性は一旦無視して安易な発想として、ロボットを代用できないか?という案が挙げられそうです。実現性の困難さえ無視できれば手段として安易に挙げられます。様々な場面でロボット適用が挙げられるでしょう。
「代わりに人と同じことができるロボットがあれば…」
人の抱える問題は人に任せるもので、機械で実現可能ならば人と全く同じことができる「人型ロボット」がいればなぁ、、と発想するのは自然だと思います。問題を置き換えやすいと思います。
1.1.3. 人型ロボット→専門機械→前提の変更・単純な方法?
しかし実際問題をつきつめて、あーでもないこーでもないと考え試し続けて、満足する解決方法発見にまで至ってみると、結局、問題となる作業や組織、システム自体の前提から無くしてしまえば単純な方法(機能・装置など)だけで解決する、という結論に行き着くかもしれません。単純な方法で解決できれば余計な手間もかからず無駄が少なくて済みます。人型なんて、ましてやロボットなんて全く要らなかった、ということは実際多いと思います。
要求ベースで進めると初めの方は
「ロボットがあれば…」
となって次に
「要求さえ満たせば良い。要求を満たすだけの機能を持った機械があれば…」
となって最終的に
「真の要求さえ満たせば良い。真の要求さえ満たすように前提から変えれば単純な方法で済むんだ」
という結論になります。
この流れを覚えると、初めの「ロボットがあれば…」という考えはもう無くしてしまい、単純な方法・装置はないかを探すラインから企画を練る方が良いように思われます。
確かに、単純な方法・装置であれば低コスト・低リスクでも済むことが多いので、開始からその方法を探すだけに傾倒しても悪くはないと思います。しかし良いとも言い切れません。結果は単純ですが過程はどうでしょうか。実際に単純な方法・装置発見に至るまでどれくらい費やすか、を計算に入れるべきです。要求分析と課題特定と方法探索を繰り返して時間と労力をかけていると、それ自体が長年かかる研究テーマに匹敵します。またターゲットを絞って要求や課題を特定すればするほど適用範囲は狭くなり使用場面も少なくなります。汎用性がなくなり使い回しが効かなくなります。要求する人の数も減ります。多くの人々の抱える問題が対象でなくなると、対価の見込みも限られてきます。
1.1.4. 要求における人型ロボット提案のメリット(安易だがシンプルでスリムな発想ができる)
人と同じことができるロボットがいれば、それはそれで単純な方法として済むわけです。ここではロボットは問題解消の実現手段と捉えておきます。
人型ロボットという実現手段を選択するメリットとは何かと言われると、人と似ていて、人と同じ動きができて、人と同じ動きをすぐに教示できてすぐ導入できることがメリットであり、運用がすぐに終了しても、汎用性があるおかげで別の新たな作業へすぐ導入できることがメリットなのです。
別の作業への導入に対応する際、ロボット会社としてはロボットをゼロから作り直したり選択したりする必要はなく、即時導入と汎用性を上げる改良にのみ注力すればいいので、改良開発の方針を決めるのが比較的ラクになるのです。これをカタカナでイイ感じに述べるならば、「シンプルでスリムな発想ができる」のがメリットだと言えるでしょうか。人型ロボットが要求される由来には、このような背景があると考えています。
1.2. シーズ(研究・開発)ベース
一方、人々の問題解決の要求をベースとしロボット実現を求める動きとは異なり、一部の人達の創造的欲求からロボットを求める別のモチベーションがあります。
物理・化学・数理現象としてこの世界の新事実を発見したい、発見し知見が得られた成果を利用・応用したい、モデル化したい、制御して望む結果を得たい、新たな技術を具現化したい、というモチベーションです。未知への探究、不可能を可能にする英知・技術的欲求などそれらを集約し体現できる対象としてロボットを求める動きです。
もしうまくいけば問題解決方法として新たな選択肢を与えてくれるわけで、新たな技術やビジネスを生む種(シーズ)となります。ロボットはシーズの塊であり、安易な要求であっても技術的な実現手段としてすぐに候補に挙げられるため、基礎研究や基礎技術開発の試作から応用・実用化転用へと発展していくことが望まれやすいのです。
ロボットの研究者やエンジニアによっては、「自身のゴールは世のため人のため、困った人々のニーズに応えることです」なんて表向きに宣言する人も、内心実はそれが一番のモチベーションではなく、単純に作りたい!世界をもっと知りたい!新しいものを作って自分を満足させたい!という欲求や、技術的困難なモノやまだ世にないモノを作ってドヤ顔したい!すげーって言われたい!という欲求が根源にあったりするのではないかと思います。Yes!Make!Yes!そして…褒めて!もっと褒めて!お金ちょうだい!1兆円!というモチベーションです。
少なくとも自分にはその欲求は少なからずあります。
根源的な欲求は人それぞれだと思いますが、創造的な欲求を満たすミステリーと可能性がロボットにあるおかげで、新たに技術が発展するという考えもあると思います。
1.3. ニーズとシーズのマッチング
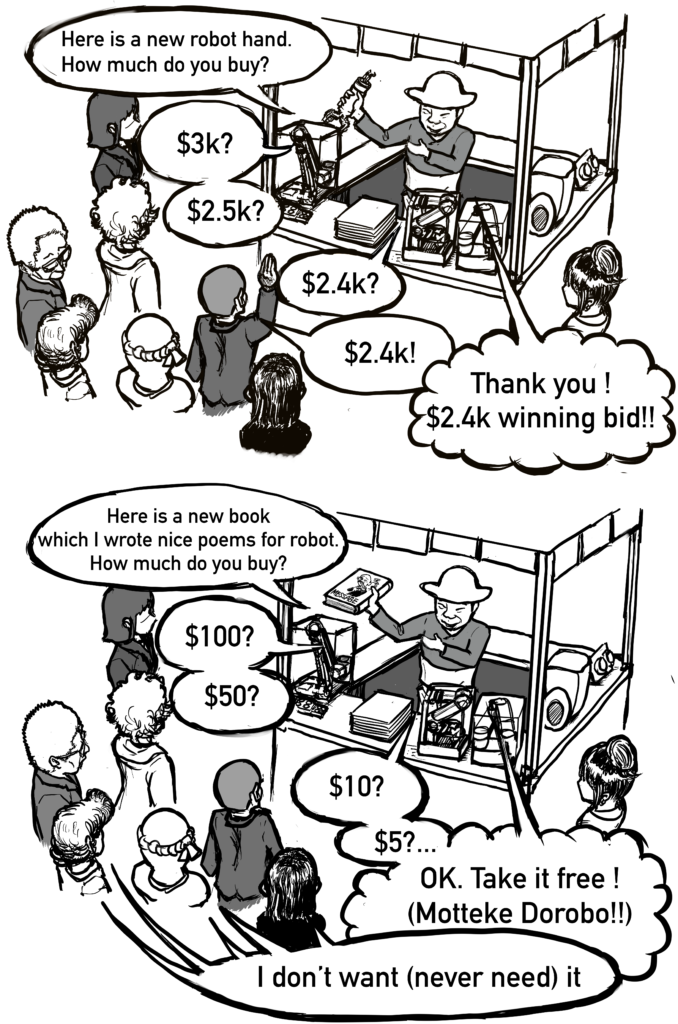
1.3.1. シーズ側の一方的な製品開発だけではゴミになる?
シーズ側から一方的に「ロボットを作らせてくれー」とロボットを作って、ニーズを持った利用側に「ええやろこれ!欲しいやろ!作ったで!ドヤ!!」と提示しても、要求に合致してなければ利用側からは「要らん!!!」と言われゴミ扱いされてしまいます。研究・開発費を何億円も使って育てた種が一瞬でゴミとして捨てられ結局何も残らなかった、という事例はよくある話です。ロボットは開発費にお金がかかりますが、プロジェクト成果がそれだけの価値があったのか分析されていないことが多いのではないでしょうか。ゴミとされる過程で開発元の組織は荒れまくり身体的にも精神的にも壊れて思考ごと腐ってしまうというのは非常に嘆かわしいことです。腐ったミカンこと、だいCです。
1.3.2. 要求を叶えられる要素技術(実現性)はある?
「ロボットよ助けてくれー」というニーズと、「ロボットを作らせてくれー」というシーズを生む動きがうまくマッチすると、ロボットを作る意義が強くなります。お金が行き来して商売として成立し上手く循環すれば継続的な事業になります。作り手側としてロボットの実用化を目指したいのであれば、ニーズとシーズのマッチングの課題に取り組む人が必要なのです。
そもそもシーズがなければ、つまり現状の人型ロボットで実現できるだけの要素技術がなければ絵に描いた餅です。要素技術が確立されていなければ無いものねだりと同じでしょう。一方、開発するにしろ研究するにしろ、ロボットで実現して欲しいという先のニーズが揃っていることも重要だと思います。ニーズに対し、今実用化できるレベルはどこまでなのか?何が技術として必要なのか?を明確にしてくれる人が圧倒的に足りていないと思うのです。そういう方は技術も需要もわかるエジソンみたいな人じゃないかと自分は思っています(エジソンはそんな人じゃない?)。
1.3.3. 市場調査とコンセプト検証
何か新しく売れる物を作り初めようとしたことがある人であれば、試作時の検討で経験したことがある人もいるかもしれません。たとえば、すでに市場があると分かっている分野では調査をもとに割と現実的な予測ができます。一方、まだ市場がない未開拓分野の場合、要求分析とコンセプト段階での試作検証が肝心になります。たとえば、完璧ではなくても良いので、コンセプト段階で段ボールで試作モデルを組み、試作モデルを使ってペルソナ(仮定する要求を持ったユーザ)の利用シーンを考えて、ユースケースを洗い出してみます。また、コンセプトを元にアンケート調査も行い、あらゆるターゲット層に当たりをつけて統計的にニーズを調査します。その結果、現時点での試作構想段階ではニーズが無い、要らない、と分かるかもしれません。そしたら諦める、、のではなく、ではどのようになれば欲しいとなるのか?当てはめたシーンは適当か?不十分な点をつきつめて改良点や将来の方向性を見つけ構想を練り直します。そして作りたいものを十分なニーズがあるものへ近づけるための課題に落としていくのです。
どのニーズに当てはめてどの課題を進めるかは作り手次第です。ニーズからの選択ではなく、シーズからの選択です。
1.3.4. 試作→試作テスト→先行品の試験販売→改良点調査
ニーズがありそうだとなると、今度は「売れる」につながる商品試作モデルを作って売り「儲る」というサイクルを継続できるようにします。事業となるビジネスモデルを考案・構築していきます。「高確率で儲る」と分かると先行投資をしやすくなり、さらにアルファ版・ベータ版として先行品の生産ができます。先行品ができると特定顧客へ試験販売をして試用してもらい課題調査します。実際に改良点が分かり修正の目処が立ち、同時に商品価値があり利益回収の目処が立つと、量産化・一般販売…と進めても大丈夫だと分かるわけで、さらに量産開発への資金を投じやすくなります。
1.3.5. 量産試作→量産テスト→製造→リリース→がっちり
そして実際に量産され、一般向けに販売され世に出回ると、多くの人がニーズを満たしたいと買い求め、ブームが起これば普及し、さらに新たなニーズも生まれるでしょう。社会に普及すると、これを作ったら売れる!という実績が示されるわけです。後追いで参入する者も出てくるでしょう。市場が生まれ、世の中に変革をもたらすことができるかもしれません。
こうしてビジネスとして成長した中で、技術的なハードルをいち早く越えることができ、かつ先行者として市場をつかみ、利益を安定して確保することができれば、資金的に余裕が生まれます。余裕が生まれると、優秀な人材を集め、さらに技術投資して新しいシーズをもっと生むことができるでしょう。
開発費をどんどん使っても回収できるわけで、作り手の「ロボットを作らせてくれー」という願いは大手を振って叶えられ、メーカーの楽園が出来上がるのでした。めでたしめでたし。
と、ここまで書いた内容はあくまで自分の描いた幼稚なサクセスストーリーです。実際はそんなに簡単ではないことは言うまでもありません。
現在産業界を切り拓いている新しい企業は、このような自分達の描く未来予想図の実現に成功しているのだと思います。元々は、新規性があるかも分からない基礎研究・要素技術がきっかけだったかもしれません。しかしその技術において世の中には未だ無い価値を見つけ出すことができて且つニーズがあるのであれば、それは美味しい果実を生む貴重な種(シーズ)であり、果てはメーカーの楽園を築けるチャンスだと思います。もっと企業が挑戦していけば、世の中に希望を与えられると思います。希望がないと、基礎研究・要素技術に携わる人達の心はどんどん腐ってしまうようにも思えます。
2. 2脚ロボットを実用化したい
2.1. 実用化させて欲しい
自分はロボットの会社に勤めているのですが、入社当時からずっと常日頃「売れて使える二足歩行の人型ロボットを作るにはどうずれば良いか」と考え続けています。単純に自分の願望として実用化したいのです。実用化するのが夢なのです。
でも会社としては「作れるかどうかも分からないし使えるか売れるかどうかも分からないものより、まずもっと確実に使えて売れるものを作って売ってくれ」というわけです。目先に見えているニーズや確立された市場に乗れば売れることはある程度分かっているため、優先順位は勝率の高い順・安定順になります。先の見えない新しいロボットを開発するのは金がかかるだけのリスクなのです。ただし誤解がないように。会社の中の人が皆作りたいという意思が無いわけではなく、会社として安定するように仕方なく目の前の市場に目を向けているのです。
「二足歩行の人型ロボットは絶対売れますよ!」と言っても、世に出ている人型ロボットの現状を見られると納得してもらえません。先程描いたような道筋が見えないからです。
「だったら道筋を描かねば…」と考えて自分はこのブログを書いてみてるわけです。どんなプロジェクトでもこのような企画資料を考える人は大変ですよね…と今思ってます。
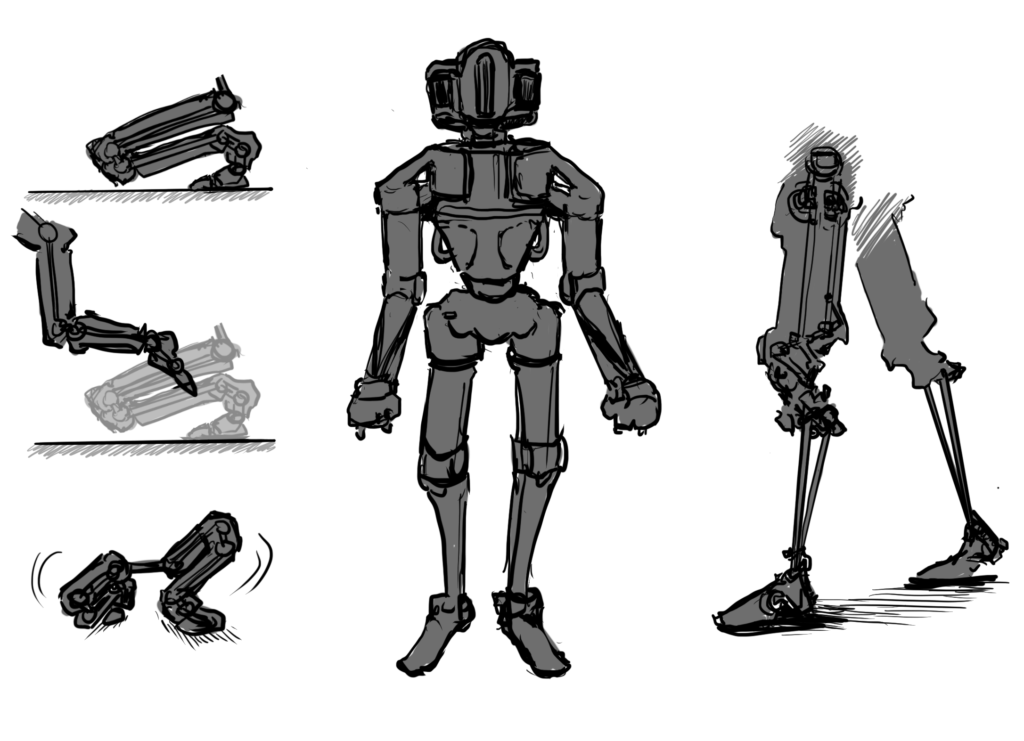
2.2. 要件定義の道筋を立てる
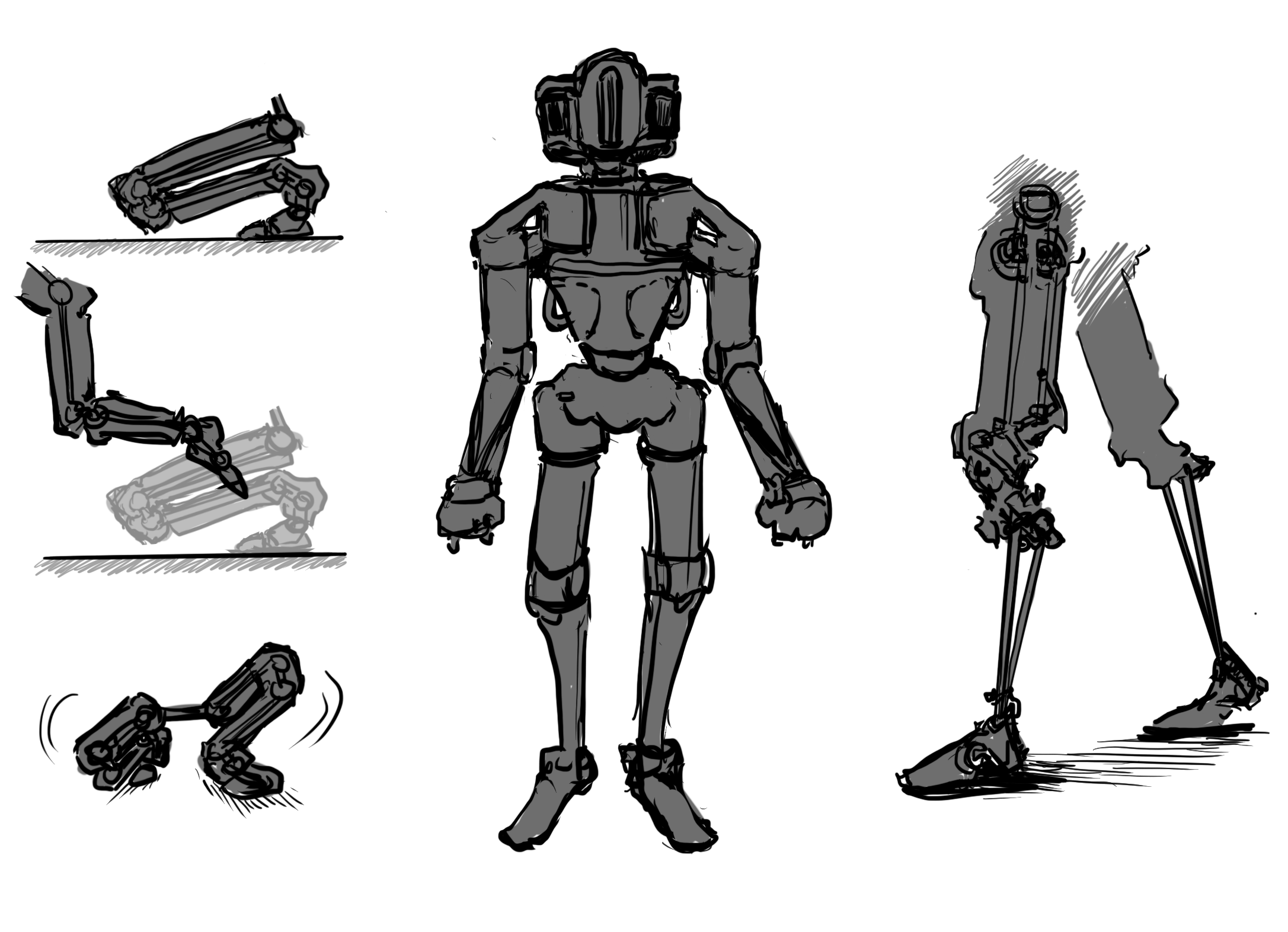
人型ロボットの イメージといえば四肢五体…手足、頭と胴体を 持ったリンク型のロボット。
特に両手両足の 運動に注目してみると、
両手を使って作業をし、両足を使って移動する。
というイメージが湧いてきます。
人型というだけあって、モデルの元となる人の、その見慣れた普段の行動が イメージになっているとも言えるでしょう。
2.2.1. 人の代わりに肉体労働をして欲しい
人の手足の作業には、肉体的な負荷を伴う作業がほとんどです。
中でも肉体労働は、手足を使った作業がほとんどといえるでしょう。
現代社会では多くの場面で肉体労働を必要としていることは知っての通りです。
肉体労働は大変だ、知的労働にシフトしよう、と安易に肉体労働を知的労働と比べたり置き換えたりするのは多少疑問があります。逆に、知的労働は大変だ、肉体労働にシフトしよう、と考えても良いでしょう。なぜ肉体労働が大変だといえるのでしょうか?ちょっと考えてみます。
2.2.2. 肉体労働の抱える問題
肉体労働の抱えている問題とは何か?を明確にしておきます。
例えば疲労です。日々生活において肉体疲労で余力を失って、精神的余裕が保てずツライという人もきっといるでしょう。過労になると深刻な問題です。
他にも例えば、一人あたりの作業量の物理的な限界です。技術の進歩と暮らしの変化とともに、職種も新たに増え、従来から在る職種においても仕事内容が多様化し、働く人数に対する仕事の作業量も大幅に増えてきた面があります。廃止された職業や仕事も多くあると思いますが、新たに増えた分と比較しても増加傾向にあるのは分かります。一人あたりの肉体労働にはどうしても空間的・時間的な作業量の限界があります。よって現実として作業量が増えたことによって、並行して働く人数も増えなければ、肉体労働には限界が生じるといった問題があります。
また、頭の中だけの作業と異なり、肉体を酷使する作業は労働安全衛生上、常に管理対象となります。場合によっては人命に関わるリスクを伴うため、現場管理の責任は重いという問題もあります。
まとめると、
- 疲労
- 一人あたりの作業量の限界
- 安全衛生管理の負担が大きい
これらが肉体労働につきまわる問題として挙げられます。
2.2.3. ロボット代行による解決の提案
もし社会に人と同じ作業ができるロボットが存在したら、
肉体労働をさせている 現場の責任者達は、労働者達の安全や 衛生管理から解放され、過労や危険回避など責任の重い管理に苦しむことがなくなるし、
肉体疲労で生活に 支障をきたしてた人々も、疲労から解放され 身体的健康を取り戻し、余力を精神面に回し心理状態を安定させ、日々くつろぎながら生活を送ることができるでしょう。
人と同じ2本の手、2本の足を持ったロボット、いわゆる人型ロボットが製品として登場し、代わりにきつい作業や面倒な作業など 色々実現できたなら、非常に簡単で分かりやすい要求実現になるかと思います。先に述べたように、シンプルでスリムな発想で済みます。
2.2.4. 人型ロボットなら分かりやすい?人型である理由への疑問
一方、人々の問題解決をベースとして、ロボットが 人型であることへの疑問が次々と湧いてきます。
・人型ロボットへの、要求は一体何なのか?
ロボットの ユーザは一体誰なのか?
利用されるのはどんなシーン?ユーザの要求とは?
・人型であることは、機能として本来の 要求に適しているのか?
・人型だから出来る事とは何なのか?人型であることの必然性とは?
・脚は必要か?あんなものは飾りでは?車輪で十分 ではないか?
・1台の売値はいくら?サービスとしての値段は?売れる価格とは?収益は?
・開発費に見合う価値があるのか?先行投資するほどの存続価値があるのか?
・継続的な商売・事業にならないと会社として続かない。一瞬のもの珍しさだけではなく。会社の事業につながる商品としてサイクルできるか?
・では実際、いったいどうやって作るのか?
…いろいろ疑問があり過ぎて、「よし!人型ロボットを 会社で作って儲けよう」なんて易々とOK出せません。これら疑問に目を瞑り「赤字になっても構わない!作りたいから作るんだ!」と、人型ロボットの開発に 全力を駆けて挑戦する…、なんてことができる会社は良いですねー、と思います。でも大部分はそうじゃないと思います。巨額の開発費を投じ製品としてリリースできたし 要求も実現できたけど、ただ赤字になるだけなら やりたくない、それが当然の考え方だと思います。
これら疑問が解消され、「人型ロボットのニーズがある!」「売れる!」「作れば儲かるチャンス!」と経営者達が納得し 確証も持てるようにならないと、作り手側のただ作りたい、という一方的な意思だけじゃ、企画を通すのは難しいです。
2.2.5. 人型ロボットの商品開発としての研究テーマ
人型ロボットの研究では、「いったいどうやって作るのか?」という 最後に挙げた難題が最大のテーマになっています。ボトムアップに考えて 要素技術から何か出口を探して考えてみる人も稀にいますが、テーマから逸れるのであまり重要視されません。そもそもテーマ設定時でも、成果が出た時点でも、それでもはっきりその先の出口が見えるわけではないので、何の役に立つかなんて問いを挙げても無闇に課題が増えてしまうだけです。
企業というビジネスの立場ならば、研究成果に目をつけて、課題を持った要素技術の段階でも要求ベースから降ってくる疑問に照らし合わせて、もっと出口の探索に手を出す人がいても良いのでは?と、自分は思います。研究者にまで出口の探索を求めるのは酷であり役割が異なるのではないかと思います。会計上では基礎・応用・工業研究、商品開発とは役割が分けてあり、協力関係のもとに互いに情報共有するものだと聞いていますが。産学連携とかグループ会社や部署間を越えた連携といいつつ、役割を分担し協力する体制が本当にできているのか?縦割の壁ばかりではないか?と疑問に思います。互いにですね。
2.2.6. 人型ロボット選定への疑問解消に必要なのは要件定義
さて話を戻して、人型ロボット選定の疑問について、まず少しは解答できそうな、以下の疑問から解消すべきかと思います。
・(要求事項)人型ロボットへの、要求は一体何なのか?
・(実現性)人型だと 一体何ができるのか?
この疑問への解答をもしも作ることができたなら、要求に優先度を振って絞り、それを要件定義とし、皆の認める明確な 製品目標を持って設計フェーズに入れます。
ただ漠然と「人型」としてロボットの 要件定義を始めると、人にして欲しいこと、人の代わりに人ができること、などなど…人にとってできることが沢山あるように、「人型」の中には要件が膨大にあると思います。
(法令や規格、ターゲットや現実的費用など制約条件で絞るのも大変です)
今回は人型ロボットの 手足の中でも足の方、両足だけに絞り要件を 定義したいと思います。
両足、言い換えると2脚です。
2脚の要件定義として、
(要求事項) 人が足を使いたいとき、一体どのようなことが要求されるのか?
(実現性) 2脚だと 一体何が実現できるのか?
について以降考えていきたいと思います。
3. ターゲット(は敢えて無し)
製品企画を考える時、ターゲットを絞り、要求を絞り、制約条件を挙げ、実現性を考えて 要件定義するものかと思われます。
例えば工場での使用を想定し、工場の種類の中でも機械類・電子機器の製造工場 で使われること、使用者は期間工のお兄さんやおじさんを想定し、、などなどターゲットを絞れば、要求も実現すべきことも絞られます。
ターゲットを選んで差別化を図る、未踏分野をターゲットにして新たな市場を開拓する、、というのはビジネスの戦略として有効な手段だと思います。
しかしここでは、あえてターゲットを絞らないことにします。
人ができることなら何でも、、「汎用型」と位置づけておきます。
2脚ロボットの汎用性を生かしたいのです。
そもそも2脚の汎用性が何かを明らかにしたい、というのも欲求としてあります。
汎用性を踏まえた上で、その多彩な利用シーンからここなら勝てる!というターゲットを選択させるという方針です。
実のところ、汎用型ロボットの実用分野で、如実に汎用性を示し活用できた事例をあまり見たことがありません。実現課題、実現課題、、とは技術者だけの問題ではありません。ロボット会社の経営者達においても、汎用ロボットに対しビジネスとしての実現課題をクリアにできていません。
多彩な利用シーンはあるものの、そこから選ぼうにもまず、汎用型のロボットが一体どこまで何ができるのか、そもそもの実現性がまず分からない、それに関わる要求も分からない、コストに見合った利用価値がわからないのです。
なので普通は皆、要求分析と検証を続けターゲットを絞り、技術的な課題を絞り、専用機械や治具などを駆使し、特定の作業のみに特化した専門機械を開発する方針に落ち着くのでしょう。
汎用性を生かすには、汎用性と結びつく要求を理解し、実現性を理解し、現実的な活用シーンを描けるかどうかに懸かっていると思います。
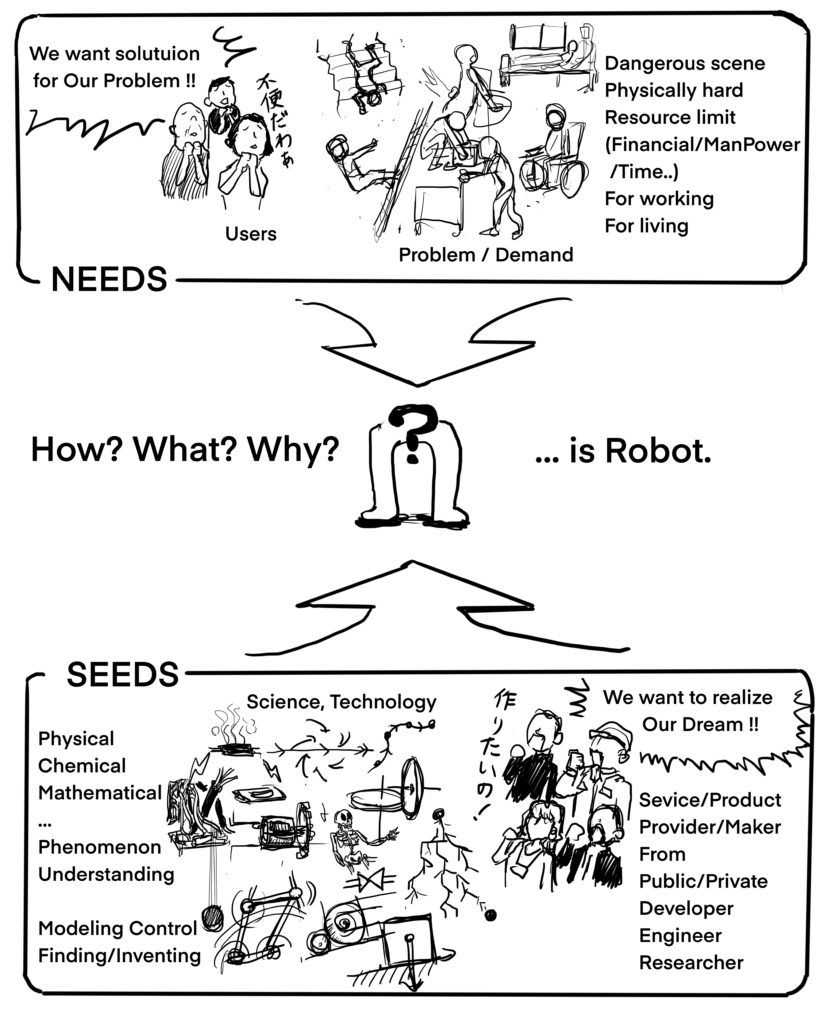
4. ニーズ(要求事項)
ここから本題のニーズ(要求事項)の洗い出しになります。
足を使う機能としてまず第一に要求されることは「移動」です。
同じ場所で両手を使って作業するデスクワークとは全く異なり、足を使って仕事するならばまず、様々な場所へ「移動」できて欲しいのが当然です。足は飾りではありませんよね(地上では)。
「移動」できた上で、さらに視覚や両手や全身を使った作業も両立して初めて仕事になる、という場合が多いでしょう。運搬など「移動」をしながら行う作業もあります。移動を伴う複合的な作業の要求にどのようなものがあるか挙げてみたいと思います。そしてそれらの作業を果たすため、2脚にどのような機能が要求されるか挙げてみます。
また、「移動」とは簡単に言っても、足を使って移動する環境は様々です。以下では、足を使って移動できて欲しい環境にどのようなものがあるが挙げてみます。
加えて、「脚」や「足」を使い対象物や障害物を操作する機能が欲しい場合もあります。イメージとしてどんなものがあるか見てみましょう。
4.1. 主に現地への移動を必要とする作業の代行をして欲しい
実は「移動」そのものが本来の目的ではない、なんて意識すらしていない
まず「移動」について、以下2点の問いを挙げてみたいと思います。
1. 「移動」の要求の元となる根本的な要求は何か?
2. 「移動」という機能はそもそも必要なのか?
これは一種の思考ゲームだと思います。
「移動」したい、という要求の多くは、そもそも「移動」自体がメインの要求ではなく、「今居る現在地とは別の目的地で、ある目的の作業(用事)を済ませたい」という要求から二次的に派生したものが多いと思います。この要求の実現手段に含まれるものといえます。
この本来の要求が、1.の解答だと考えます。
生物を見渡すと様々な「移動」が見れられます。空を飛んだり水中を泳いだり別の生き物に付着したり寄生したり。移動形態は様々です。生存戦略として「移動」が必要という考えもあります。もし我々人類がテレポーテーションで自分を移動させることができ、サイコキネシスで食料を自分の体に取り入れることができれば、手足は不要となり、異なった姿かたちをしていたかもしれません。場所への「移動」という過程が無くなると「移動」なんてただの無駄なことで暇な人の趣味と言われていたかもしれません。
まあそんな妄想は置いておいて。
その場合自分自身が実施することに意義があり何かに代行させることはナンセンスでしょう
1.の解答について、移動後のその本来の要求とやらさえ実現できれば「移動」の手段は何でも良い!といってしまえばその通りかもしれません。もちろん手段の中には経路も含まれており、空路で飛ぼうが、陸路で走ろうが何でも良い!となります。
では次いで、とりあえず移動の手段は置いておいて、
「今いる現在地とは別のある目的地で、ある目的の作業(用事)を済ませたい」
というその本来の要求とやらについて考えてみます。
その目的地に本当に移動しないと、目的の用事が本当にできないケースって何があるでしょう?これが本節の冒頭で述べた2.の問いに関連します。
例えば情報交換です。
情報交換って聞くと、皆で集まって会議やおしゃべりするイメージがあります。そしたら、会議室に集まるために移動が必要なのでは?と思いますが、
いえいえ、移動はしなくてもいいでしょう。もはや今ではインターネットを介して遠隔通信でTV会議やチャットでのおしゃべりができますね。おしゃべりの内容が複雑過ぎて直接会わないと伝えるのが難しい場合は置いておいて。
では、会議やおしゃべりという情報交換をするといった目的は、移動という手段がなくても目的自体は達成できますね?
いや、やっぱりちょっと待ってください。
遠隔通信でその目的を達成するということは、その通信を実現するハードウェア、端末のカメラやマイク、ケーブルや無線機、無線塔から電力送線など、その物理的な機器が端末利用者の場所にまで揃っていることが前提にあります。それら物理機器が無いゼロの場所から情報を取ってくるには、まずその場所に機器を設置工事しに行く過程が少なくとも一回以上は必要です。関連して、物理機器が揃っているという前提を実現するには、それらの機器をどこかから調達することが必要になります。
今挙げた例だと、遠隔通信を行う目的を実現するためには前提となる、物理機器の「設置」、「調達」といった目的を達成する必要があります。そしてその目的を達成するためには、「移動」が必要です。
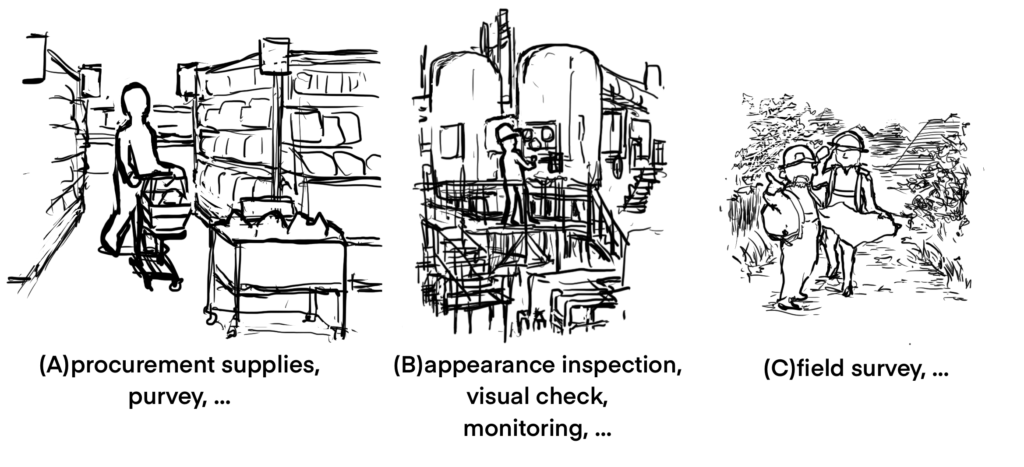
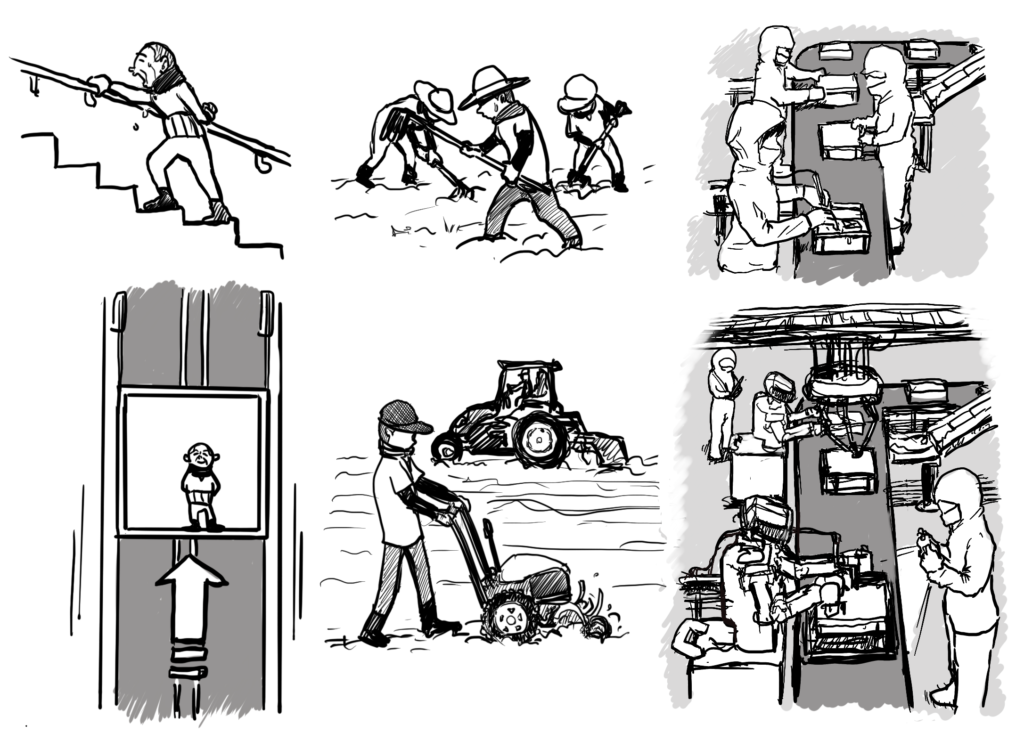
通信機器に限らず、もっと身近な例だとご飯を食べること、にも当てはまります。我々は生きるために毎日食事を必要とします。食事をするために飲食店へ出かけるならば移動が必要なのは分かります。自宅に居ながらにして食べたい、もしくは自分の好きな場所で食べたいならば、その場所へ持ち合わせるため食料の調達が必要です。近くのスーパーに食料が揃っている環境ならば買出しに行ったり(図中(A)のイメージ)、もしくは出前・デリバリーを頼むなど実現手段があるでしょう。そして、それら食料の設置、調達を行うためには、やはり誰かしらによる「移動」が必要です。
また、ネットワークの発達した現代では移動が必要なさそうな他の例として、大規模なプラント工場、機械工場などで定期的に必要な設備の「点検・検査」が挙げられます(図中(B)のイメージ)。設備の周囲全体をカメラで囲んで遠隔から監視することで、現地に移動しなくても外観検査ができるように思えます。しかし、風化や腐食による設備の物理的な変質を見つけるために、直接指やハンマーで触れて感知するなど、現地での確認が必要な場合もあるでしょう。そのような点検・検査では、検査対象に触れるため、検査範囲に合わせて検査する人がその特定部位まで「移動」することが必要になるかと思います。
他にも、野外の地理や環境の「調査」や「探検」をしたい場合も、やはり「移動」が必要になると思います(図中(C)のイメージ)。
こんな風に一見すると「移動」が必要では無さそうなケースでも、前提を掘り起こすと実は「移動」を必要するという、ある種屁理屈みたいにどこにでも「移動」の必要性を見つけ出せると思います。
「移動」という機能は必要です。これが本節の冒頭で述べた2.の解答になります。
「移動」して、本来の目的である作業を遂行したい。
ロボットに対してだと、「移動」して、目的の作業を代行して欲しい、
これが根本的な要求にまずあると考えます。
4.2. 運搬作業を代行して欲しい

移動した後、目的の作業をしたい、という場合は多いとは思いますが、
移動しながら、目的の作業をしたい、という場合もあるでしょう。
「運搬」という作業は、まさに移動しながら同時に目的を遂行する作業かと思います。むしろ移動ができなければ成り立たないという場面も多いはずです。
では既存のものから考えて、運搬作業をメインとする仕事って何があるでしょう?
- ベルボーイ/ベルガールのような荷物持ち
- ウェイトレス/ウェイターのような配膳/下前
- 郵便/宅急便のような宅配サービス(料理の宅配?ケータリング?)
- 物流倉庫での搬送業務
- 土木工事現場での搬送業務
- 建設工事現場での搬送業務
- 長距離移動を伴う運送業務
ちなみに曖昧に「搬送業務」と書いてみましたが、荷揚げや荷下しや積み方まで含めての移動や、大型で重い荷物を運ぶ移動、パレットに載せて運ぶ移動、台車に載せて牽引する移動など形態は様々あります。人は、人力では持ち上げることが無理な荷物に対しては、クレーンやフォークリフト、トラクタなどを利用して搬送を実現しています。
もしロボットが代わりに搬送する場合だと、たとえば大型で力持ちなロボットを適用したり、搬送機械自体がロボットとなり、そのまま荷物を自動で運ぶという方向性もあるかもしれません。
また他にも、ロボットが人と同じサイズで人と同じように搬送機械を操縦して自動で運ぶ、という方向性もあるかもしれません。
ただし先にも述べたように実現できるかどうかはここでは置いておきます。ロボットへの要求に何があるかを挙げることが目的なのです。
4.3. 運搬作業の対価は既存の運送サービス料金同等以下にして欲しい
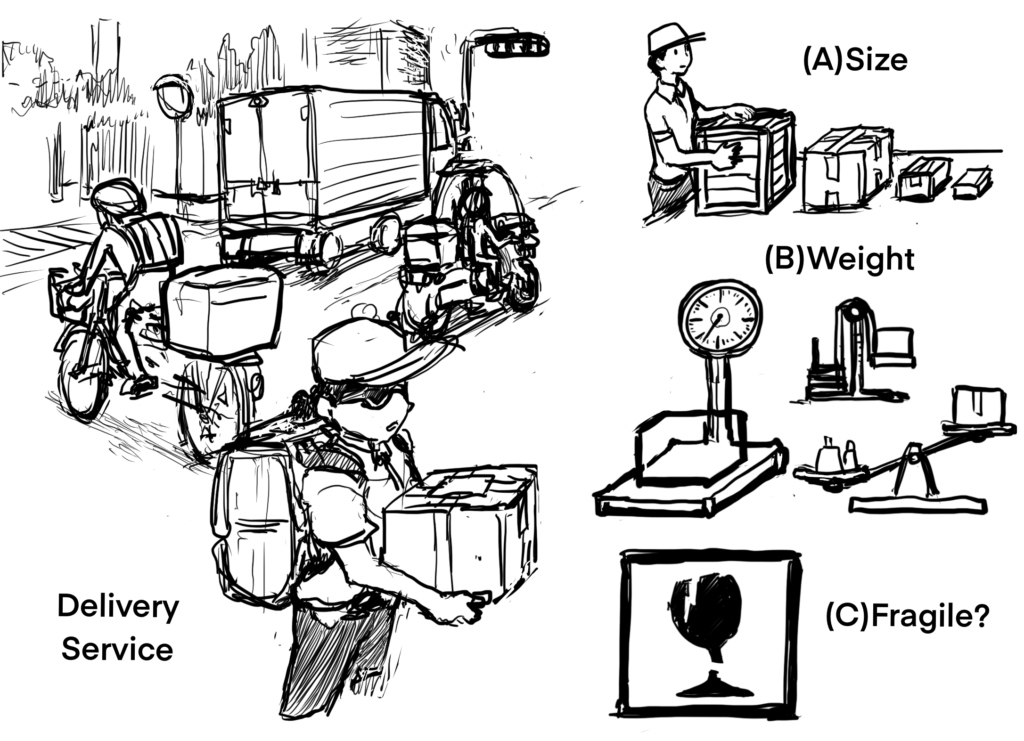
常日頃から郵便や宅配サービスを一般消費者として利用している人は、荷物の大きさや価格で大体どれくらいの料金がかかるかご存知でしょう。
適正運賃の原価計算の方法をこちらのサイトで分かりやすく例示してくれています。運送原価+附帯作業原価+車両留置原価+高速道路利用料等+その他費用が原価合計となり、そこに収益を加えたものが運賃となるそうです。
4.4. 乗り物として移動して欲しい
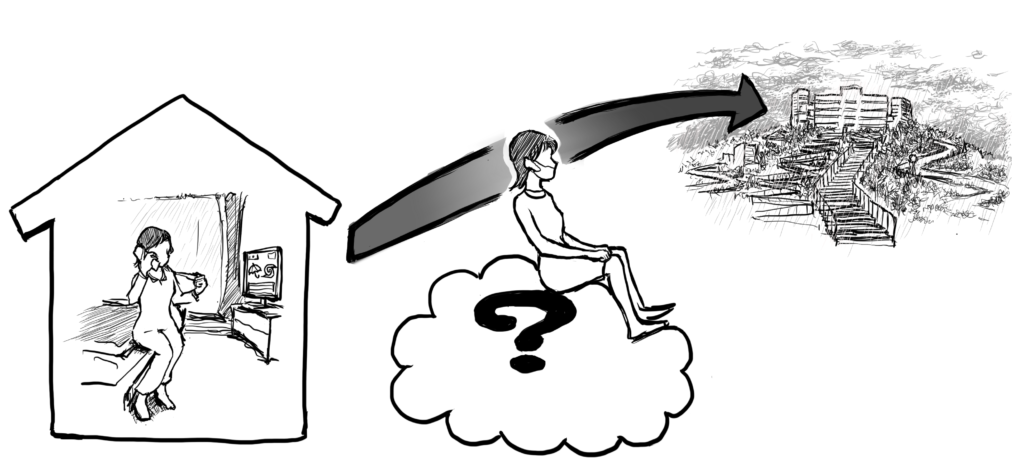
人にとって「移動」が求められるシーンについて考えた所、たとえもしどこにでも移動できるロボットが登場したとしても、およそ初めの頃は、ロボットに「代わりに目的地へ行ってきて欲しい」という要望もあっても、やはり「自分自身がその場所に行きたい」という要望は必ずあるのではないでしょうか。
その場合、目的地に到達するのが目的であって、過程である経路間の移動は自分の足を使うのは面倒でしんどい、または病気や老化の弱体化や麻痺などで足を使えないかもしれない、何かしらに任せたい、という要望があると予想します。自分の移動を機械に任せたい、つまりロボットへの要求に当てはめるとロボットを「乗り物」として利用できて欲しい、という要求に結びつくと考えられます。
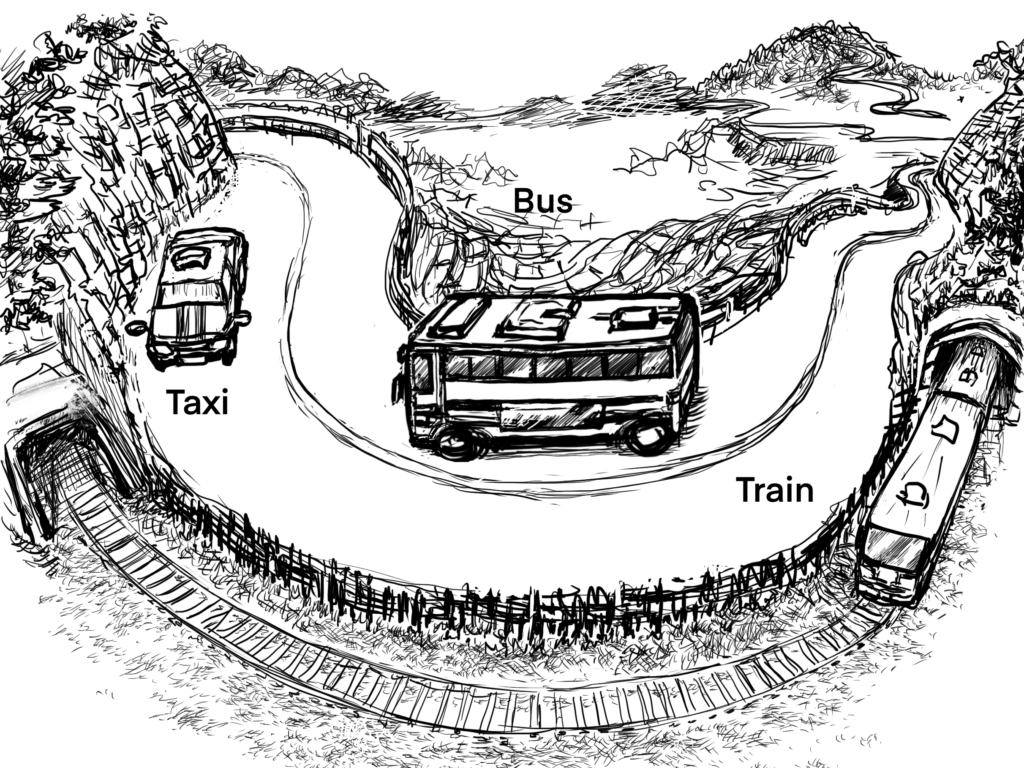
実際、人は昔から移動を牛や馬やロバや犬に任せたり、現代では交通整備された場所であればバイクや自動車を使って運転したり、運転は運転手に任せてタクシーやバス、鉄道、飛行機を利用するなど、乗り物に移動を任せて目的地に到達するということが当たり前になっています。乗り物に乗れば移動できることが当たり前になったので、おそらく人は「乗り物に移動を任せている」という意識はないでしょう。乗れば目的地に着くのは当たり前という認識です。単純に乗り物とは「移動手段」と認識しているのではないでしょうか。
現在乗り物を使用せず移動するシーンといえば、短い距離の移動であったり、交通整備されていない場所、足を使わないと通れない経路の移動が挙げられます。
4.5. 足を使わないと通れない経路を、気軽な乗り物として移動して欲しい
自分自身では移動できない場合、今は介護に頼るしかない
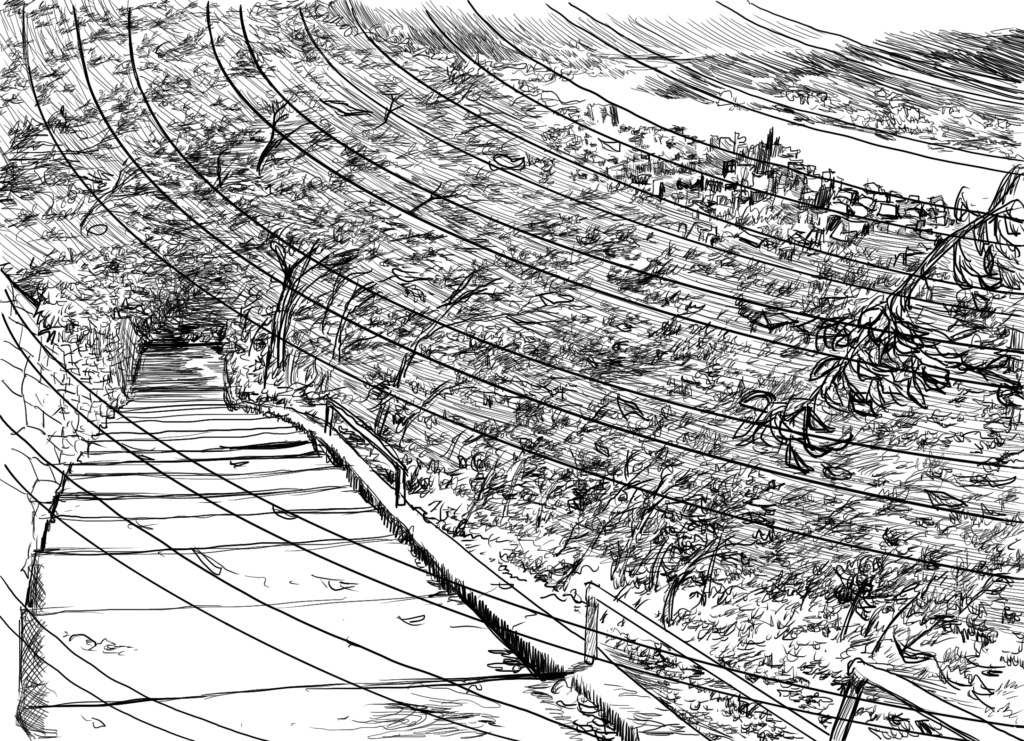
足を使わないと通れない経路とは、四輪車や二輪など道路で走る乗り物に乗ったままでは通れない経路です。たとえば、ひび割れた道路、跨げる高さの段差や障害物の多い部屋、まばらな足場、階段、はしご、せまい通路、勾配の急な坂道、山道などなど、探してみるといくらでもあります。そのような不整地とよばれる経路を含む環境で暮らしたり、そのような場所で何かしら作業したいとき、まず自身の足で作業目的の場所へ辿り着くまでの経路を移動できなければいけません。
自分自身で移動できない場合、我々は誰かの助けを必要とします。ここでの助けが必要とは、緊急治療や医療支援が必要というわけではなく、ただ移動ができないという場合です。身内や親戚、友人や知人など誰かしらの助けを得たいが、そのような頼れる人が近くや周りにいない人もいると思います。また、身内や親戚、友人や知人からボランティアとして頻繁に助けを得るのは忍びない、なるべく避けたい、助けを得るならきちんと対価を支払いたい、と思う人も多いと思います。そのような要求に応える1つとして介護サービスがあると思います。曖昧な支援ではなく、きちんと介護内容と成果を明確にし仕事として対価を決め、サービスの提供側と利用側の対等な関係を築いてあれば過剰な気遣いや気苦労をもたずに済むでしょう。
現在、足を使わないと移動できない経路において、自分自身の移動を任せられるモノ・サービスは、障害者用〜とか介護型〜といったり健常者とは異なる扱いを受けるものがほとんどだと思います。健常者と同じ扱いを受けたい人もいるでしょう。できるなら、人の手に依存する介護を利用しなくて済むようにしたい、自身の力(財力)で移動したい、環境のリフォームや乗り物の使用といったモノの使用だけで解決したい、という要求は既にあるはずです。
ここでもし、足を使わないと通れない経路を移動できる乗り物が登場したとしましょう。そしたら選択肢が拡がります。介護を利用しなくて済むようにしたい、乗り物に任せて移動したい、という要求に応えられるはずです。
以上のことから、2脚ロボットへの要求の一つとして「足を使わないといと通れない経路を、気軽な乗り物として移動して欲しい」を挙げておきます。
4.6. 交通整備された道路用の乗り物の対価は、既存の交通サービス料金と同等以下にして欲しい
乗り物が移動できるように線路を敷いたり道路を舗装したり滑走路を作ったり、、現存の移動技術を最大限に実用化させるため、大規模な交通整備を展開してきました。交通整備された環境において、乗り物を利用する交通サービスも発展しています。
交通サービスを利用する側にとって、運賃が無料であればラッキー☆と思いますが、提供する側にとっては用意した環境や乗り物の初期投資や維持費用の回収、従業員の賃金支払いなどサービスを維持する対価として運賃が必要です。
もし新しい乗り物として移動ロボットが登場したとしても、似たような理由で対価は必要でしょう。
利用する側としては、新しい乗り物が既存の交通サービスと同等の移動機能であれば、対価も同等であって欲しいと思います。
では既存の交通サービスを参考に、交通運賃の料金設定は、どのように変わるか少し見てみましょう。以下Wikipediaやらでざっと調べた感じになります。
| 行先の自由度 | 運行時刻の 自由度 |
移動 範囲目安 |
速度(km/h) | 運賃 | ||
| タクシー | ほぼ固定なし | ほぼ固定なし | 1km〜 | 10〜70 | 1000〜円/km | |
| バス | 固定 | 固定 | 路線バス500m〜200km | 10〜70 | 200〜1000円 | |
| 鉄道 |
路面 | 固定 |
固定 |
2km〜1,000km |
10〜20 | Wikipedia.運賃 |
| 普通 快速 |
30〜90 | |||||
| 特急 | 50〜110 | |||||
| 新幹線 | 120〜230 | |||||
| 飛行機 | 固定 | 固定 | 250km〜2,500km | 980〜1111 (マッハ0.8〜0.9) |
国内LCL エコノミー 20,000〜80,000円 |
|
距離単価では、おそらくバスと鉄道が最も安いといえます。移動時間も含めると飛行機が最もお得に見えます。行き先の自由度と運行時刻の自由度が固定されない分、タクシーは良い値段です。予約席や個人スペースの確保など指標はまだあると思いますが、これを見る限り、例えば5〜10分間1km乗り物として移動するだけで5,000円とか1万円かかるとしたら、それは相場として高過ぎるといえます。京都で人力車に乗るようなエンタメ要素などの付加価値がない限り、価格は上記既存の交通サービスに揃えて欲しいところです。
4.7. 足を使わないと通れない経路用の乗り物としての対価は、既存の介護サービス料金同等以下にして欲しい
交通整備された場所での乗り物としての移動は、上記のように既存のモデルを参考にすることができました。
一方、人しか通れない場所ではどうでしょう?現在そのような乗り物は存在しませんよね。
対価の話として介護の妥当な料金設定とは?という疑問が浮かんできます。ベッドからリビングまでの移動を介護してくれたら500円?…なんて料金の決め方はないでしょうが、自動介護サービスへの報酬はいくら?と真面目に考えると難しいものです。既存の介護サービスをそのままスライドすることは妥当でしょうか?介護側の難易度に応じて妥当な価格設定を割り振って欲しいとも思いますが、ヘルパーさんを雇うとしたら、介護保険を使わなければ月20〜30万円とか。保険が適用されても介護認定のレベルによって利用者の負担は異なったりします。専用の集団施設に入れば介護負担がある程度限定されて相応の価格になるそうですが、施設内でしか移動できないなど…料金設定は単純ではなさそうです。くさか里樹氏の漫画「ヘルプマン!」を全巻読んでみると課題があることがよく分かります。なのでここでは簡単に答えは出せないので置いておきます。
4.8. 有害汚染区域の中を移動して欲しい
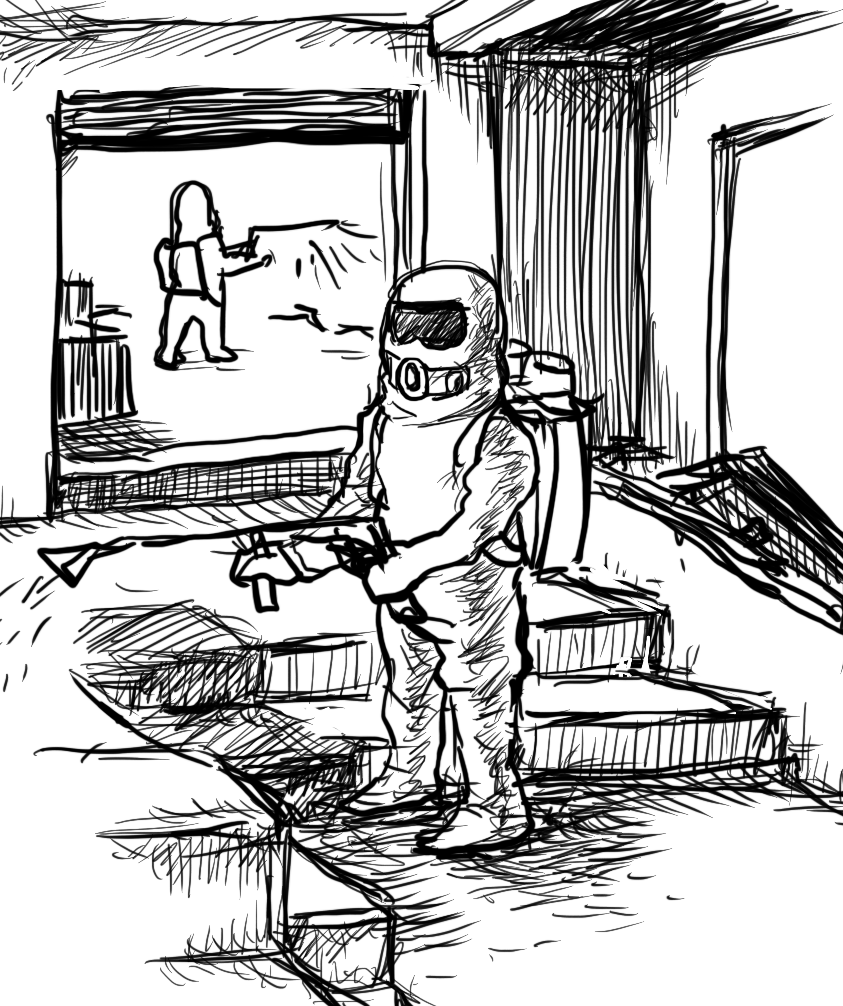
放射能や有害ガス、ウィルスにより居住区域が汚染されロックダウンされるといった事が、今や起きないとは言えない時代になってしまいました。人々が避難した後、汚染区域に立ち入る必要が生じた場合、人命を危険に晒さないために、代わりにロボットに出向いてもらいたいという要求は当然あります。
要求としては、人には有害な環境でもロボットには耐えることができて欲しい。その上で移動できて欲しい。となります。
また、最近ではロケットなど宇宙開発の進化が目覚しく、火星や月に辿り着くことも夢では無くなってきています。未知の惑星への宇宙探査が、地球に住む者のために新たな知見を与えたり、新たな地として活用できるチャンスを生むかもしれません。難易度の高さからも人類進歩への貢献度も大きく、潜在的な有用性の高さからも要求は人類全体レベルの規模だと言えます。そのような極限環境へ人の代わりにロボットへ行ってきて欲しい、という要求は同等にあると思います。要求としては、地球上とは異なる大気成分、異なる重力、異なる温度の環境でも耐えることができて欲しい。その上で移動できて欲しい。となります。
4.8. 狭い経路を移動して欲しい

都会の建物の中など、自然環境ならば洞窟や木々の生茂る山の中など、人が通るのがやっとくらいの狭い経路がたくさんあります。我々が活動する空間はわりと開けた広い場所が多いと思うかもしれませんが、生活する空間は、我々の使い勝手が良いように狭い場所が多いです。特に日本の都市部では密集してて狭い空間が多い印象です。
人が通れる場所であってもそうでなくても通れるのであれば、狭い場所を代わりに移動できて欲しいという要求があると思います。
4.9. 強風の中を移動して欲しい
台風が来たとき我々人間は安全のため外出を避けますよね。強風で身体が煽られて飛ばされるかもしれないし、物が風で飛んできてぶつかるとケガするかもしれません。
物が飛んでくる場合はとりあえず置いておいて、ロボットが風で煽られて飛ばされないように移動できれば、代わりにお願いすることができるわけです。
よって強風の中を人の代わりに移動できて欲しい、という要求を挙げておきます。
4.10. 障害物を避けて移動して欲しい
障害物を何と定義するかは場合によると思いますが、とりあえず「移動の妨げになる物」としましょう。
障害物にぶつかっても、さらに環境を破壊しながら経路を変えず突き進んで移動することもできます。しかし人は通常、障害物という環境の破壊が不可能もしくは許可されない場合は、避けて通ります。ロボットにも同様の要求となります。
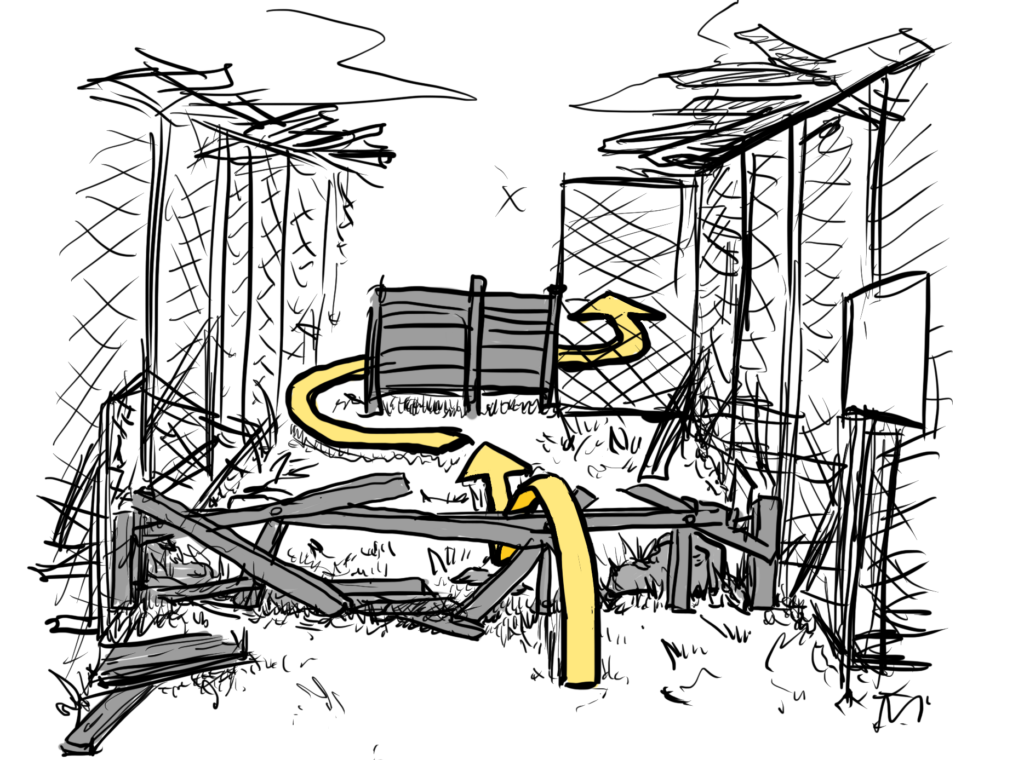
4.10.1. 移動する経路を選択する際、障害物は跨いだり遠回りして環境を壊さず避けて欲しい
障害物を回避する場合、その程度も様々だと思います。距離を大きく空けたり、スレスレで避けたり、一部ぶつかりながら避けたり…。
移動というタスクにおいては邪魔でしかない障害物ですが、元々移動のために存在するわけではないため、障害物などの環境は破壊せず保持して欲しい、という要求が当然あると思います。
環境の保持というと、路面に足跡を残さないで欲しい、特殊な床やモノを経路とするとき踏んで変形させないで欲しい、など要求の難易度も変わります。
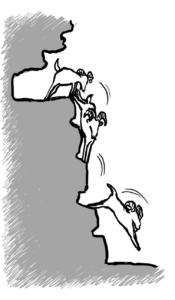
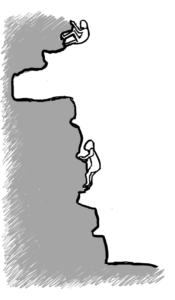
4.11. 急な段差(崖)を移動して欲しい。
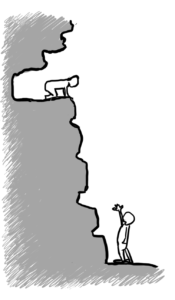
日本は火山大国であり島国であるため、山が多く海に囲まれています。隆起や沈降や断層により岩山は形を変え、海岸は波で削られ、急な崖が数多く生まれ現在も存在します。人々は崖のような地域に住んでいたり、趣味でロッククライミング、登山などレクリエイションとして崖のある場所へ移動することもあります。
人が暮らす場所であれば、これまで挙げた例に沿って人の代わりに移動して欲しい、という要求があります。
居住地域でなくても、崖のような危険な場所に出向く人がいて災害などに見舞われて断崖絶壁に取り残されてしまった場合、レスキューする必要があるかもしれません。その場合、危険を冒して人が救助に行かなくても、ロボットの代わりに行ってもらえると助かるでしょう。
↓以降、移動環境について、さらに要素的な要求について挙げてみます。
人工的に限定された技術的ハードルの低い環境から、自然発生し限定されていない技術的ハードルの高い環境まで挙げてみました。
4.12. 塗装された床面を移動して欲しい

塗装された路面とは、塵や凹凸がないように綺麗に整えて、工場での生産のために用意された安定した環境に当たります。工場からお店など、産業においては路面が塗装された環境上での移動が前提となることがあります。
生産を安定させるため、余計に考えないといけない問題は排除してあります。最も技術的なハードルが低くされていると言って良いかもしれません。
4.12.1. 塗装された水平な床面を移動して欲しい
4.12.2. 塗装された傾斜のある床面を移動して欲しい
4.13. 工場での移動機能の対価は既存のAGVの価格同等以下にして欲しい
工場での使用を想定する場合、現在すでに産業用のAGV(Automated Guided Vehicle:無人搬送車)というモノが市場に出回っているので、それと比較することができます。特に用途・価格帯も調査すれば知ることができます。
すでに市場がある場合、購入者にとって価格は既存のものと同等以下にして欲しいと思うのは当然の要求かと思います。
4.14. 舗装された路面を移動して欲しい



4.14.1. 舗装された水平な路面を移動して欲しい
4.14.2. 舗装された傾斜のある路面を移動して欲しい
4.14.3. 舗装された曲面のある路面を移動して欲しい
4.15. 濡れている舗装された路面を移動して欲しい

4.16. 凍結した舗装された路面を移動して欲しい

4.17. 舗装されていない路面を移動して欲しい

4.17.1.水平な/傾斜の/曲面のある固く湿った泥土の路面を移動して欲しい
4.17.2. 水平な/傾斜の/曲面のある草の茂った路面を移動して欲しい

4.17.3.水平な/傾斜のある乾いた砂地の路面を移動して欲しい
4.17.4. 石ころだらけの路面を移動して欲しい

4.18. 足元の脆い経路を移動して欲しい
4.18.1. 足が沈み込む柔らかい雪道や泥道を移動して欲しい

4.18.2. 足場の崩れやすい丸太や岩場の上を移動して欲しい
4.19. 穴だらけの経路を移動して欲しい
4.20. 階段など段差のある経路を移動して欲しい


4.21. 山道や岩道を移動して欲しい



以上のように、我々人間が二脚だけで可能な「移動して欲しい」という要求は、簡単に挙げたつもりでも非常にたくさんあることが分かります。
以上に挙げた要求を全て満たすことができれば、汎用的なロボットと言えると思います。
5. シーズ(移動ロボットの実現性)
ここからシーズとなります。実現性といっても現在本当に技術的に実現可能なのかは実は置いてあります。これまで挙げた要求では、ほとんど人の代わりに移動にまつわるものでした。
ニーズベースであれば、各要求を満たす移動さえできれば形はどうでも良いと言えます。
それでは各移動の要求を満たすような移動ロボットの形態が何があるかざっくり挙げてみます。
5.1. 移動ロボットの形態
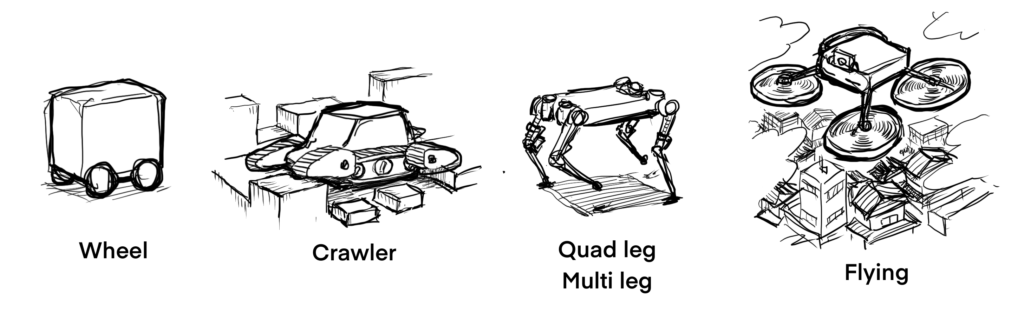
移動ロボットの形態には、二脚以外だと例えば以下のような物が挙げられます。
- 車輪移動型
- クローラ移動型
- 多脚移動型
- 空中移動型(飛行型)
それぞれ得意・不得意はあると思いますが、要求を多く満たすほど汎用性は高いといえます。この中で実現性の技術的ハードルが低そうなもので、技術的に分かりやすそうでかつシンプル(低コスト)なものは、車輪移動でしょうか。安易にそのようなことを書くと怒られるかもしれませんが。
車輪移動では舗装された整地での移動を前提として、複雑な問題を削ぎ落として、それ以外の問題に焦点を当てて取り組むことができるというメリットがあると思います。
5.2. 車輪ロボットの形態
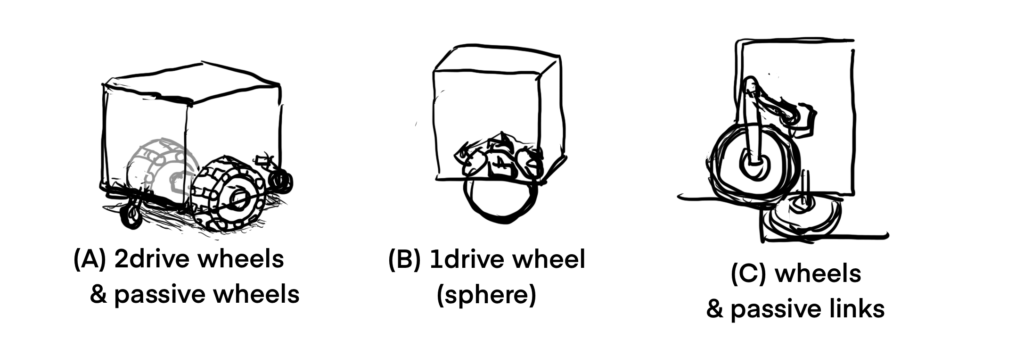
車輪型といっても、そこらの道路で走ってる自動車のような4輪とは限りません。全車輪数、駆動輪の数や配置で変わるとその場で旋回できたり機能がガラッと変わります。上の落書きはパッと自分が挙げられる例となります。
- 二輪駆動(中央配置)
- 一輪工藤(玉乗り型)
- リンク付き車輪型
しかし、これらの車輪型では4章に挙げた要求を全て満たすことができないのは分かると思います。やはり汎用性という潜在能力を持つという意味でも二脚ロボットを選択する意義は大きいと思います。
5.3. ハイブリット型の二脚ロボット
他の形態だけが持つメリットは、二脚型には持てないのか?という疑問もあります。
例えば合体型、ハイブリッド型というのも考えてもいいわけですね。
機能を付加できる反面、コストがかさむので、コストに見合うだけの機能の付加価値を定量評価し、ムダかどうか判断する必要があります。
しかしまあ単純に、技樹的には面白そうだと思います。
6. シーズ(二脚ロボットの実現性)
6.1. 二脚の移動できる場所
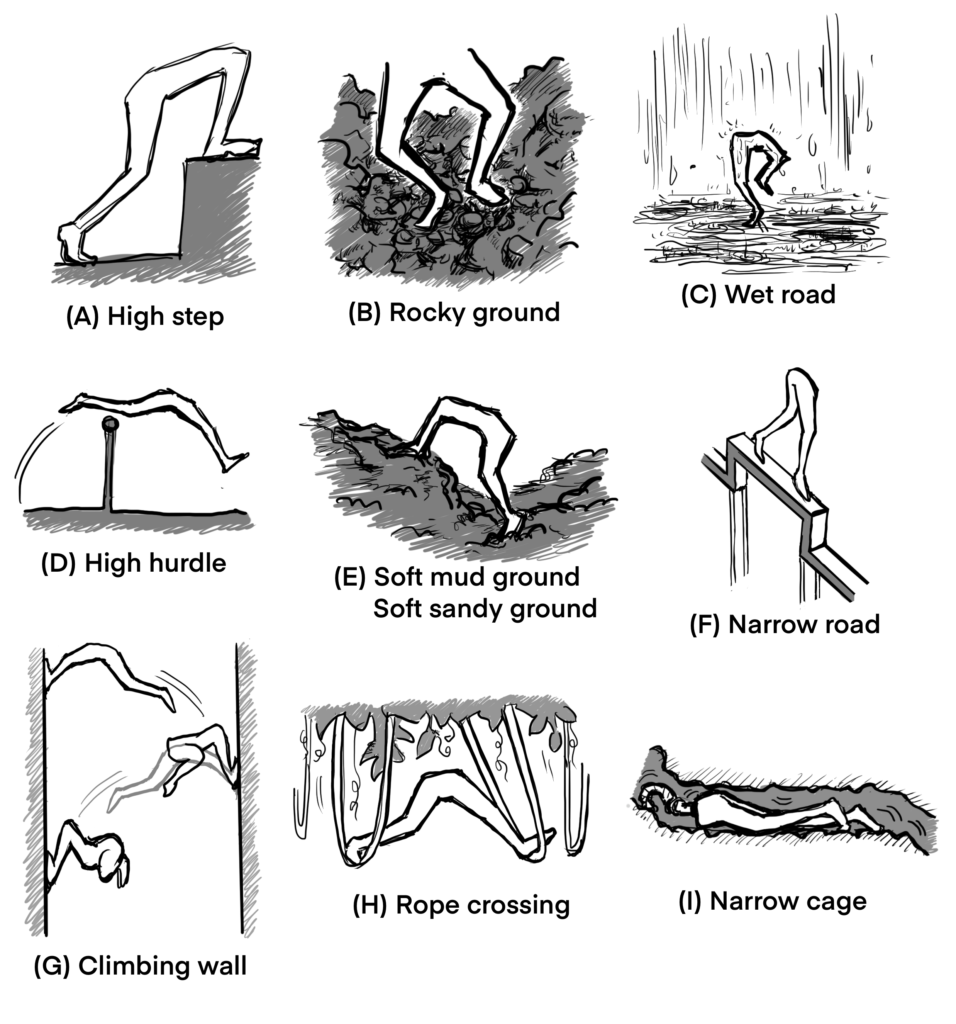
二脚ロボットとして現状技術的に実現できるかどうかは置いて、二脚という形態であれば人と同じく上図に挙げたように以下の場所を移動できると期待できます。
- (A) 高い段差
- (B) 岩場
- (C) 濡れた路面
- (D) 跳躍を必要とするような高い障害物
- (E) 柔らかい泥土、砂場
- (F) 狭い通路
- (G) 壁蹴りで駆け上がる壁
- (H) 綱渡り
- (I) 狭いほら穴
これら全ての場所の移動をクリアできること、汎用性を持つことが、二脚の実現性の強みであり、要件になります。
6.2. 二脚が持つ移動形態
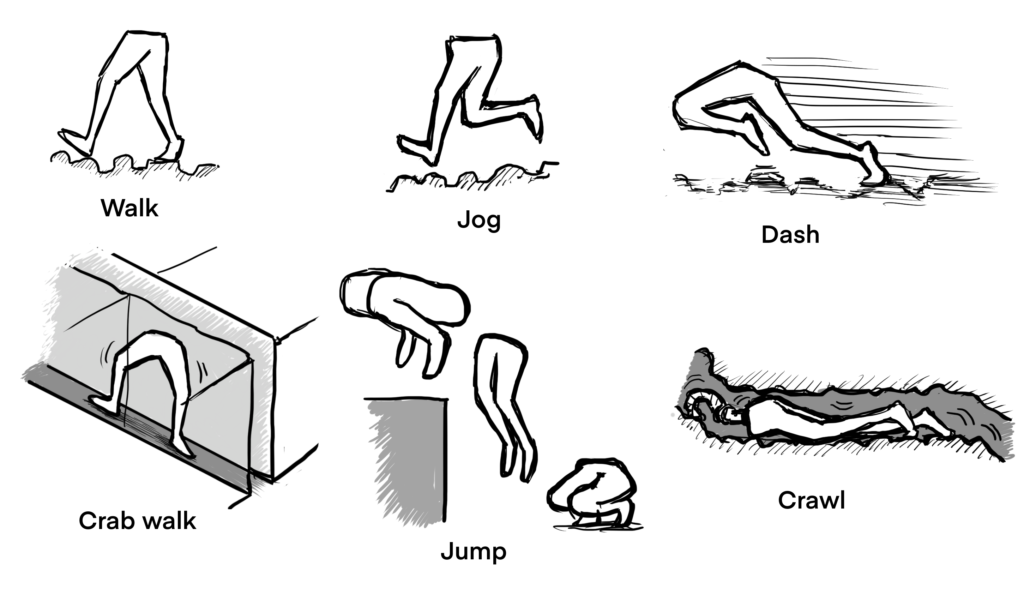
二脚によって空間・時間において自由に移動できることを例として挙げておきます。もう一度書いておきますが現実で二脚ロボットとして技術的にできるかどうかは置いてあります(しつこいのでもう書きません)。
- 歩く(足が片方は必ず地面に付いた移動)
- ジョグ(ゆっくり走る)
- ダッシュ(すばやく走る)
- かに歩き
- 跳躍(足を付いたままでは届かない場所へ飛び移る)
- 匍匐(ほふく)前進(膝やつま先で蛇のように、にじり歩く)
6.3. 二脚ができる移動を伴う作業
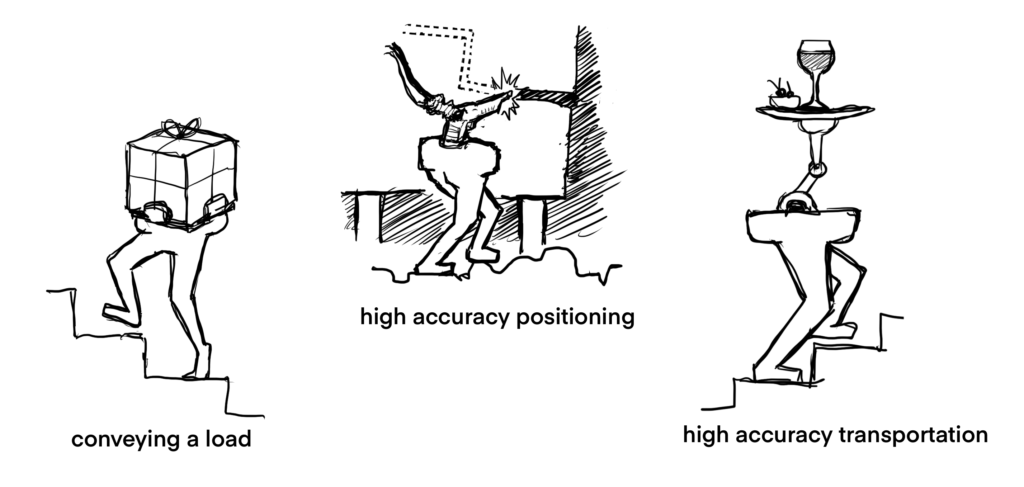
「移動しながら作業を行う」ということが要求にはありました。
もちろん二脚の実現性に照らし合わせてもできることだと思います。
6.4. 二脚ができる移動以外の作業(双腕代わり)
二脚をメインとしてできる機能は移動だけなのか?というと、いやもっと可能性はあるぞ!と思います。
例えば、乱暴かもしれませんが、二本の足を双腕として扱ってもいいわけです。
ここからは、二脚の移動以外の機能も考えてみます。
6.5. 二脚ができる移動以外の作業(投げる)

双腕と似たことができることから、物を投げることも実現性に入れておきます。人はループシュートのように、足で柔らかく掬って投げることができます。
二脚ができることの一つに数えておきましょう。
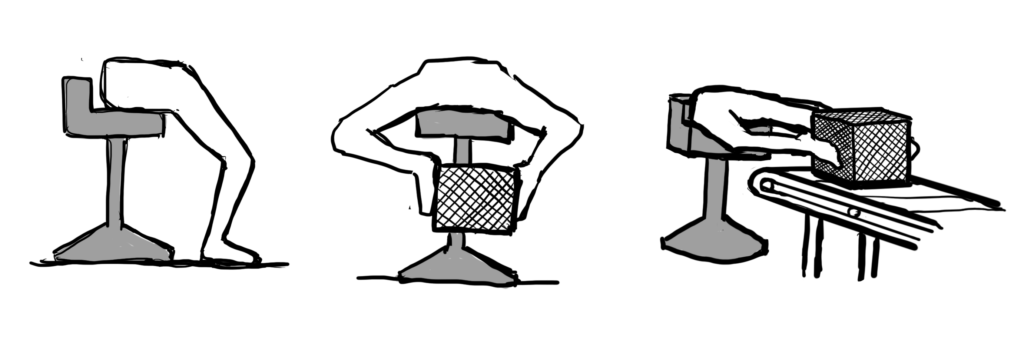
6.6. 二脚ができる移動以外の作業(色々)
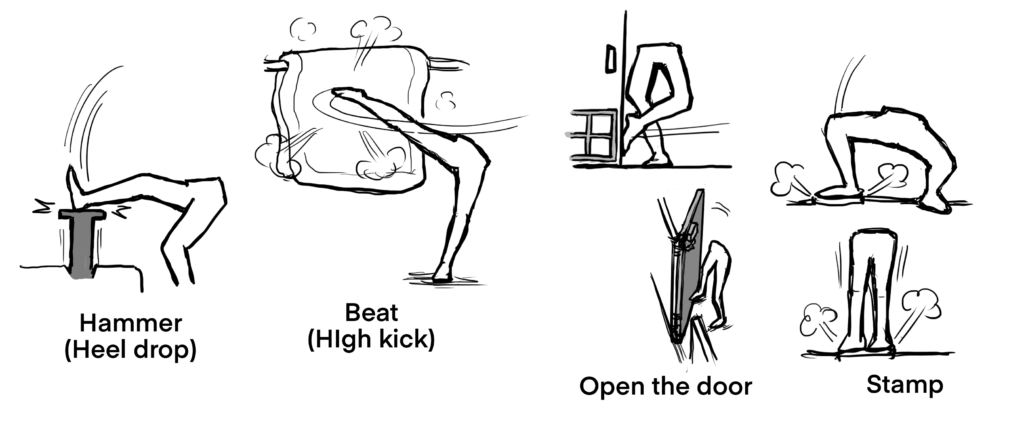
双腕の代わりになるとのことで、特に脚は腕より力があることを生かして上の図のような作業ができるのではないかと挙げてみました。
- かかと落としによる杭打ち
- ハイキックによる布団たたき
- ドア開け
- 足踏みによる踏み固め、タップダンスなど
普段手を使って行う作業を、足を使って行うことは「行儀が悪い」と言われます。人からすると行儀の上ですべきではないことだからといって、二脚ロボットも同じようにすべきではないと捉えることはありません。行儀なんて思いもよらないように、たとえば足を足と見えないように、外見上の機械デザインにより工夫すればよいものだと思います。
6.7. 二脚移動中の外乱に耐える
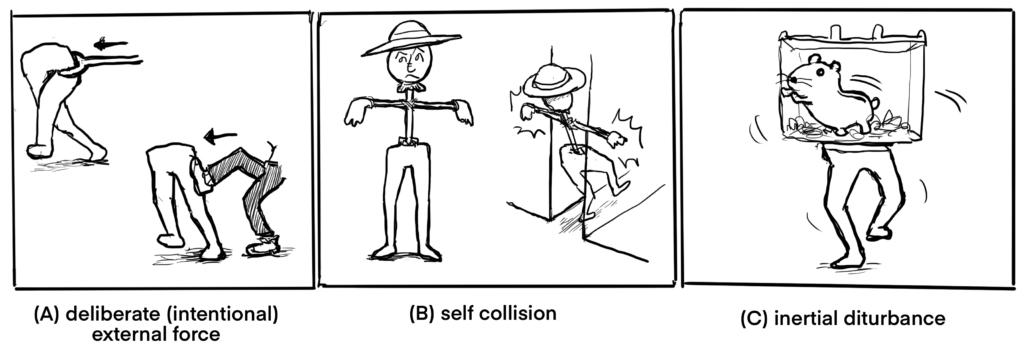
ここでいう外乱とは、意図せず入力され目標への制御を邪魔するものを指します。ここでは特に、移動を邪魔するものを指します。
- (A) 横から押されて外力が加わる
- (B) 自身で環境に衝突・接触し反力が加わる
- (C) 重心や慣性モーメントが変化する
運搬物が中で動いたり、構造が変化して質量分布が変化したりなど
避けられるならばそれでOKですが、どうしてもこれら外乱が加わることがあります。その場合、外乱に耐えて移動を崩さないようにできないといけません。
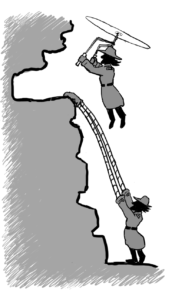
6.8. 人間には難しい二脚だけでの復帰

二脚ロボットの要求では主に移動できることを前提としてきていましたが、移動が失敗した時のエラーについても対応できていなければいけません。二脚で移動が失敗した時とは、「歩行や走行すべきなのに転倒してしまった場合」と定義しておきます。
転倒してもまた移動再開できるように起きて立ち上がって復帰できて欲しいです。それは基本機能であって欲しいです。が、しかし人間だと二脚だけだと案外転倒状態から起きたり立ち上がるのは難しいものです。やってみると分かります。どこかに手をついて起き上がるのはラクです。なんとか頑張れば、二脚だけでも起き上がることは出来なくはないです。
人で頑張れば出来るのであれば、ロボットであれば二脚だけで起き上がるように作ってあるべきです。参照のモデルの性能の低さは克服しておくべきだと考えます。
ふぅ〜。。とりあえず以上になります。
ここで挙げたものは私がパッと思いついたものになります。
ニーズとシーズを書き出すだけ書き出しただけで、結局何も検証できていないわけですが…。
もちろんこれだけでは、ニーズとシーズの検討には全く不十分です。
けど一度通してやってみると色々と課題や方針が見えてきます。
考え出したらキリがないと思うかもしれませんが、地味に真面目に考え続けることが、実は手っ取り早くて簡単な方法かもしれません。
最初に述べたように、汎用でなければ人型のメリットはないと考えています。
これまでの産業用ロボットは、人の能力のエリアとは異なる「精度」「力強さ」「速度」の三本柱をウリにして発展してきました。従来の産業用ロボットのウリは、人間では届かない能力にあり、働く人間とは勝負の土台が異なっていたのです。
しかし一方最近の各ロボット会社のトレンドとしては、協働ロボット、サービスロボットの分野が(改めて?)注目され、人が持っている能力と被るエリアをターゲットにするようになってきました。ただし人と同程度以下の能力エリアでは、汎用性を示す「器用さ」「多機能」と、さらに「即時導入」の柱がウリになっていないと、人間や専用機械とそのまま勝負しても勝てない、という事がだんだん分かってきています。機能で勝負せず「コスト」だけで勝負に走り買い叩かれて死亡、というルートも見えてきています。
二脚ロボットについても、世の中にはまだ実用化できたモノは存在しませんが、求められていることは同じだと思っています。
上に挙げたすべての要求を一つでも叶えられるよう、技術的な実現性を一つずつクリアし続けることが技術者として重要だと思います。また、一つでも実現できてくれれば、要求を叶える商品としてどんどん世に出して発展していくことが、ロボットの企業としての務めであり醍醐味ではないかと思います。
それではまた。